Карта Икеда - Ikeda map
Эта статья может быть слишком техническим для большинства читателей, чтобы понять. Пожалуйста помогите улучшить это к сделать понятным для неспециалистов, не снимая технических деталей. (Июнь 2016 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |

В физика и математика, то Карта Икеда дискретное время динамическая система предоставленный сложная карта

Первоначальная карта была впервые предложена Кенсуке Икеда как модель света, проходящего через нелинейно-оптический резонатор (кольцевая полость содержащий нелинейный диэлектрик средний) в более общем виде. Икеда, Дайдо и Акимото преобразовали его в упрощенную «нормальную» форму. [1][2] - электрическое поле внутри резонатора на n-м шаге вращения в резонаторе, а и являются параметрами, которые указывают лазерное излучение, подаваемое извне, и линейную фазу через резонатор, соответственно. В частности, параметр называется параметром диссипации, характеризующим потери резонатора, и в пределе карта Икеда становится консервативной картой.





Исходная карта Икеда часто используется в другой модифицированной форме, чтобы учесть эффект насыщения нелинейной диэлектрической среды:

Реальный 2D-пример приведенной выше формы:


куда ты параметр и

За , эта система имеет хаотический аттрактор.

Аттрактор
Этот анимация показывает, как изменяется аттрактор системы при изменении параметра изменяется от 0,0 до 1,0 с шагом 0,01. Динамическая система Ikeda моделируется для 500 шагов, начиная с 20000 случайно расположенных начальных точек. Построены последние 20 точек каждой траектории, чтобы обозначить аттрактор. Обратите внимание на бифуркацию точек аттрактора как увеличена.

 |  |
 |  |




Точечные траектории
На графиках ниже показаны траектории 200 случайных точек для различных значений . На врезке слева показана оценка аттрактор а на вставке справа - увеличенный вид графика основной траектории.
 u = 0,1 | 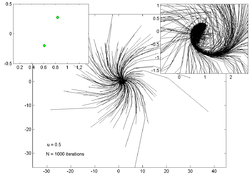 u = 0,5 | 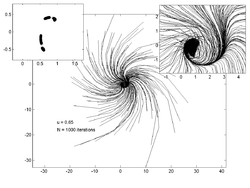 u = 0,65 |
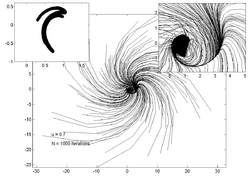 u = 0,7 | 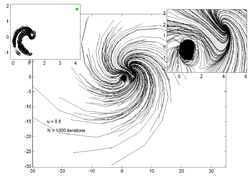 u = 0,8 |  u = 0,85 |
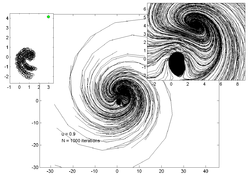 u = 0,9 |  u = 0,908 | 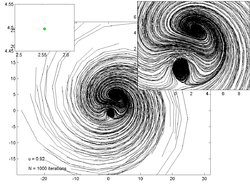 u = 0,92 |
Код Octave / MATLAB для точечных траекторий

Код Octave / MATLAB для генерации этих графиков приведен ниже:
% u = параметр ikeda% option = что строить% 'trajectory' - построить траекторию случайных начальных точек% 'limit' - график последних нескольких итераций случайных начальных точекфункцияИкеда(u, вариант)п = 200; % сколько начальных точек N = 1000; % сколько итераций Nlimit = 20; % построить эти последние точки для опции 'limit' Икс = Randn(1, п) * 10; % случайные начальные точки у = Randn(1, п) * 10; за п = 1: Р, Икс = compute_ikeda_trajectory(ты, Икс(п), у(п), N); выключатель вариант дело 'trajectory'% - построить траектории множества точек plot_ikeda_trajectory(Икс); держать на; дело 'предел' plot_limit(Икс, Nlimit); держать на; иначеdisp ('Не реализовано'); конецконец ось в обтяжку; ось равный текст(- 25, - 15, ['u =' num2str(ты)]); текст(- 25, - 18, ['N =' num2str(N) 'итерации']);конец% Постройте последние n точек кривой - чтобы увидеть конечную точку или предельный циклфункцияplot_limit(Х, п)участок(Икс(конец - п:конец, 1), Икс(конец - п:конец, 2), 'ко');конец% Постройте всю траекториюфункцияplot_ikeda_trajectory(Икс)участок(Икс(:, 1), Икс(:, 2), 'k'); % Подожди; plot (X (1,1), X (1,2), 'bo', 'markerfacecolor', 'g'); откладыватьконец% u - параметр ikeda% x, y - начальная точка% N - количество итерацийфункция[ИКС] =compute_ikeda_trajectory(и, х, у, N)Икс = нули(N, 2); Икс(1, :) = [Икс у]; за п = 2: N т = 0.4 - 6 / (1 + Икс ^ 2 + у ^ 2); x1 = 1 + ты * (Икс * потому что(т) - у * грех(т)); y1 = ты * (Икс * грех(т) + у * потому что(т)); Икс = x1; у = y1; Икс(п, :) = [Икс у]; конецконецРекомендации
- ^ Икеда, Кенсуке (1979). «Многозначное стационарное состояние и его неустойчивость проходящего света системой кольцевого резонатора». Оптика Коммуникации. Elsevier BV. 30 (2): 257–261. Bibcode:1979OptCo..30..257I. CiteSeerX 10.1.1.158.7964. Дои:10.1016/0030-4018(79)90090-7. ISSN 0030-4018.
- ^ Икеда, К .; Daido, H .; Акимото, О. (1980-09-01). «Оптическая турбулентность: хаотическое поведение проходящего света из кольцевой полости». Письма с физическими проверками. Американское физическое общество (APS). 45 (9): 709–712. Bibcode:1980ПхРвЛ..45..709И. Дои:10.1103 / Physrevlett.45.709. ISSN 0031-9007.

