Обратимый клеточный автомат - Reversible cellular automaton
А обратимый клеточный автомат это клеточный автомат в котором каждая конфигурация имеет уникального предшественника. То есть это обычная сетка ячеек, каждая из которых содержит состояние, полученное из конечного набора состояний, с правилом одновременного обновления всех ячеек на основе состояний их соседей, так что предыдущее состояние любой ячейки перед обновлением можно однозначно определить из обновленных состояний всех ячеек. В обращенная во времени динамика обратимого клеточного автомата всегда можно описать другим правилом клеточного автомата, возможно, в гораздо большей окрестности.
Известно несколько методов определения обратимых правил клеточных автоматов; к ним относятся блочный клеточный автомат метод, в котором каждое обновление разбивает ячейки на блоки и применяет обратимая функция отдельно для каждого блока, а клеточный автомат второго порядка метод, в котором правило обновления объединяет состояния из двух предыдущих шагов автомата. Когда автомат не определяется одним из этих методов, а вместо этого предоставляется в виде таблицы правил, проблема проверки того, является ли он обратимым, разрешима для блочных клеточных автоматов и для одномерных клеточных автоматов, но является неразрешимый для других типов клеточных автоматов.
Обратимые клеточные автоматы образуют естественную модель обратимые вычисления, технология, которая может привести к созданию вычислительных устройств со сверхнизким энергопотреблением. Квантовые клеточные автоматы, один из способов выполнения вычислений с использованием принципов квантовая механика, часто требуется, чтобы они были обратимыми. Кроме того, многие проблемы физического моделирования, такие как движение частиц в идеальный газ или Модель Изинга выравнивания магнитных зарядов, естественно обратимы и могут моделироваться обратимыми клеточными автоматами.
Свойства, связанные с обратимостью, также могут быть использованы для изучения клеточных автоматов, которые не обратимы на всем своем конфигурационном пространстве, но которые имеют подмножество конфигурационного пространства в качестве аттрактор что все изначально случайные конфигурации сходятся к. В качестве Стивен Вольфрам пишет: «Попав на аттрактор, любая система - даже если она не имеет обратимых основных правил - должна в некотором смысле демонстрировать приблизительную обратимость».[1]
Примеры
Одномерные автоматы
Клеточный автомат определяется своим клетки (часто одно- или двумерный массив), конечный набор значения или состояния, которые могут входить в каждую ячейку, район связывая каждую ячейку с конечным набором соседних ячеек, и обновить правило в соответствии с которым значения всех ячеек обновляются одновременно в зависимости от значений соседних с ними ячеек. Простейшие возможные клеточные автоматы имеют одномерный массив ячеек, каждая из которых может содержать двоичное значение (либо 0, либо 1), причем каждая ячейка имеет окрестность, состоящую только из нее и двух ближайших ячеек с каждой стороны; это называется элементарные клеточные автоматы.[2] Если правило обновления для такого автомата заставляет каждую ячейку всегда оставаться в одном и том же состоянии, тогда автомат обратим: предыдущее состояние всех ячеек может быть восстановлено из их текущих состояний, потому что для каждой ячейки предыдущее и текущее состояния являются одно и тоже. Точно так же, если правило обновления заставляет каждую ячейку изменять свое состояние с 0 на 1 и наоборот, или если оно заставляет ячейку копировать состояние из фиксированной соседней ячейки, или если оно заставляет ее копировать состояние, а затем отменять его значение, оно обязательно обратимо.[3] Тоффоли и Марголус (1990) эти типы обратимых клеточных автоматов, в которых состояние каждой клетки зависит только от предыдущего состояния одной соседней клетки, назовем «тривиальными». Несмотря на свою простоту, правило обновления, которое заставляет каждую ячейку копировать состояние соседней ячейки, важно в теории символическая динамика, где он известен как карта сдвига.[4]
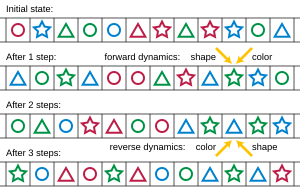
Немного менее тривиально, предположим, что ячейки снова образуют одномерный массив, но что каждое состояние является упорядоченная пара (л,р) состоящий из левой части л и правая часть р, каждое из которых берется из конечного набора возможных значений. Определите функцию перехода, которая устанавливает левую часть ячейки как левую часть ее левого соседа, а правую часть ячейки - как правую часть ее правого соседа. То есть, если состояние левого соседа (а,б) и состояние правого соседа (c,d), новое состояние ячейки является результатом объединения этих состояний с помощью попарной операции × определяется уравнением (а,б) × (c,d) = (а,d). Пример этой конструкции приведен на иллюстрации, на которой левая часть графически представлена как форма, а правая часть представлена как цвет; в этом примере каждая ячейка обновляется формой своего левого соседа и цветом своего правого соседа. Тогда этот автомат обратим: значения на левой стороне каждой пары перемещаются вправо, а значения на правой стороне перемещаются влево, поэтому предыдущее состояние каждой ячейки может быть восстановлено путем поиска этих значений в соседних ячейках. Операция × используется для объединения пар состояний в этом автомате, образует алгебраическую структуру, известную как прямоугольная полоса.[5]
Умножение десятичные числа на два или на пять можно выполнить одномерным обратимым клеточным автоматом с десятью состояниями на ячейку (десять десятичных цифр). Каждая цифра продукта зависит только от соседства двух цифр в данном числе: цифры в той же позиции и цифры на одну позицию вправо. В более общем смысле, умножение или деление дважды бесконечных последовательностей цифр в любом основание б, на множитель или делитель Икс все простые множители также являются простыми множителями б, является операцией, образующей клеточный автомат, потому что она зависит только от ограниченного числа соседних цифр и обратима из-за существования мультипликативные обратные.[6] Умножение на другие значения (например, умножение десятичных чисел на три) остается обратимым, но не определяет клеточный автомат, потому что нет фиксированного ограничения на количество цифр в начальном значении, которое необходимо для определения одной цифры в результат.
Нетривиальных обратимых элементарных клеточных автоматов не существует.[7] Тем не менее, возможный промах обеспечивается Правило 90 и другие элементарные клеточные автоматы на основе Эксклюзивный или функция. В Правиле 90 состояние каждой ячейки является исключающим ИЛИ предыдущих состояний двух ее соседей. Такое использование исключающего или делает правило перехода локально обратимым в том смысле, что любая непрерывная подпоследовательность состояний может быть сгенерирована этим правилом. Правило 90 не является обратимым правилом клеточного автомата, потому что в Правиле 90 каждое присвоение состояний полному массиву ячеек имеет ровно четыре возможных предшественника, тогда как обратимые правила должны иметь ровно одного предшественника для каждой конфигурации.[8]
Critters

Игра жизни Конвея, одно из самых известных правил клеточного автомата, необратимо: например, у него есть много шаблонов, которые полностью отмирают, поэтому конфигурация, в которой все клетки мертвы, имеет много предшественников, а также Эдемский сад паттерны без предшественников. Однако другое правило, названное его изобретателями «Critters», Томмазо Тоффоли и Норман Марголус, обратима и имеет такое же динамическое поведение, как Life.[9]
Правило Critters - это блочный клеточный автомат в котором на каждом шаге ячейки автомата делятся на блоки 2 × 2, и каждый блок обновляется независимо от других блоков. Его функция перехода переворачивает состояние каждой ячейки в блоке, который не имеет ровно двух живых ячеек, и, кроме того, поворачивает на 180 ° блоки с ровно тремя живыми ячейками. Поскольку эта функция обратима, автомат, определяемый этими правилами, является обратимым клеточным автоматом.[9]
Если начать с меньшего поля случайных клеток, сосредоточенных в более крупной области мертвых клеток, появляется множество мелких паттернов, подобных жизненным планер сбежать из центральной случайной области и взаимодействовать друг с другом. Правило Critters также может поддерживать более сложные космические корабли различной скорости, а также генераторы с бесконечным множеством разных периодов.[9]
Конструкции
Известно несколько общих методов построения автоматически обратимых правил клеточных автоматов.
Блокировать клеточные автоматы
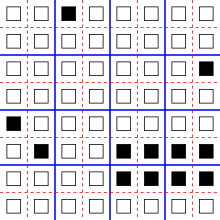
А блочный клеточный автомат - автомат, в котором на каждом временном шаге клетки автомата разбиваются на конгруэнтные подмножества (называемые блоками), и одно и то же преобразование применяется независимо к каждому блоку. Как правило, такой автомат будет использовать более одного раздела на блоки и будет переключаться между этими разделами на разных временных шагах системы.[10] В часто используемой форме этой схемы, называемой окрестностью Марголуса, ячейки автомата образуют квадратную сетку и разбиваются на более крупные квадратные блоки 2 × 2 на каждом шаге. Центр блока на одном временном шаге становится углом четырех блоков на следующем временном шаге, и наоборот; таким образом, четыре ячейки в каждой 2 × 2 принадлежат четырем различным квадратам 2 × 2 предыдущего раздела.[11] Обсужденное выше правило Critters является примером этого типа автоматов.
Разработать обратимые правила для блочных клеточных автоматов и определить, является ли данное правило обратимым, легко: для того, чтобы блочный клеточный автомат был обратимым, необходимо и достаточно, чтобы преобразование, применяемое к отдельным блокам на каждом шаге автомата, было обратимым. . Когда блочный клеточный автомат обратим, обращенная во времени версия его динамики также может быть описана как блочный клеточный автомат с той же блочной структурой, использующей обращенную во времени последовательность разбиения клеток на блоки и с функцией перехода для каждый блок является обратная функция исходного правила.[10]
Моделирование необратимых автоматов
Тоффоли (1977) показали, как встраивать любые необратимые d-мерное правило клеточного автомата в обратимое (d + 1)-мерное правило. Каждый d-мерный срез нового обратимого правила имитирует один временной шаг исходного правила. Таким образом, Тоффоли показал, что многие особенности необратимых клеточных автоматов, такие как способность моделировать произвольные Машины Тьюринга, можно было бы также распространить на обратимые клеточные автоматы.
Как предположил Тоффоли, Хертлинг (1998) Как было доказано, увеличение размерности, вызванное методом Тоффоли, является необходимой платой за его общность: при мягких предположениях (таких как трансляционная инвариантность вложения) любое вложение клеточного автомата, имеющего Эдемский сад в обратимый клеточный автомат должен увеличивать размерность.
Морита (1995) описывает другой тип моделирования, который не подчиняется предположениям Хертлинга и не изменяет размерность. Метод Мориты может моделировать конечные конфигурации любого необратимого автомата, в котором есть «неподвижное» или «мертвое» состояние, так что если ячейка и все ее соседи находятся в состоянии покоя, то на следующем шаге клетка остается неподвижной. В моделировании используется обратимый блочный клеточный автомат той же размерности, что и исходный необратимый автомат. Информация, которая была бы уничтожена необратимыми шагами моделируемого автомата, вместо этого отправляется из конфигурации в область бесконечного покоя моделирующего автомата. Это моделирование не обновляет все ячейки моделируемого автомата одновременно; скорее, время моделирования одного шага пропорционально размеру моделируемой конфигурации. Тем не менее, моделирование точно сохраняет поведение моделируемого автомата, как если бы все его ячейки обновлялись одновременно. Используя этот метод, можно показать, что даже одномерные обратимые клеточные автоматы способны к универсальным вычислениям.[12]
Клеточные автоматы второго порядка

В клеточный автомат второго порядка техника - это метод превращения любого клеточного автомата в обратимый клеточный автомат, изобретенный Эдвард Фредкин и впервые опубликовано несколькими другими авторами в 1984 г.[13] В этом методе состояние каждой ячейки в автомате во время т является функцией обеих своих окрестностей во времени т − 1 и своего собственного состояния во времени т − 2. В частности, функция перехода автомата отображает каждую окрестность в момент времени т − 1 к перестановка на наборе состояний, а затем применяет эту перестановку к состоянию во время т − 2. Обратную динамику автомата можно вычислить, отображая каждую окрестность на обратную перестановку и действуя таким же образом.[14]
В случае автоматов с двоичными состояниями (нулем или единицей), есть только две возможные перестановки в состояниях (тождественная перестановка и перестановка, которая меняет местами два состояния), которые сами могут быть представлены как Эксклюзивный или состояния с двоичным значением. Таким образом, любой обычный двузначный клеточный автомат может быть преобразован в правило клеточного автомата второго порядка, используя функцию перехода обычного автомата для состояний в момент времени т − 1, а затем вычислить исключительное или этих состояний с состояниями в момент времени т − 2 для определения состояний во времени т. Однако определенное таким образом поведение обратимого клеточного автомата может не иметь ничего общего с поведением клеточного автомата, от которого он был определен.[14]
Любой автомат второго порядка может быть преобразован в обычный клеточный автомат, в котором функция перехода зависит только от одного предыдущего временного шага, путем объединения пар состояний из последовательных временных шагов автомата второго порядка в отдельные состояния обычного клеточного автомата. автомат.[14]
Сохраненный ландшафт
Одномерный клеточный автомат, найденный Патт (1971) использует окрестность, состоящую из четырех смежных ячеек. В этом автомате ячейка меняет свое состояние всякий раз, когда она занимает знак "?" позиция в шаблоне «0–10». Никакие два таких шаблона не могут перекрываться, поэтому один и тот же «ландшафт», окружающий перевернутую ячейку, продолжает присутствовать после перехода. На следующем шаге ячейка в том же "?" положение снова перевернется в исходное состояние. Следовательно, этот автомат является обратным самому себе и обратим. Патт выполнил поиск грубой силы всех двухуровневых одномерных клеточных автоматов с малыми окрестностями; эти поиски привели к открытию этого автомата и показали, что это был простейший из возможных нетривиальных одномерных обратимых клеточных автоматов с двумя состояниями. Не существует обратимых автоматов с двумя состояниями и окрестностями из трех клеток, и все обратимые автоматы с двумя состояниями и окрестностями из четырех клеток являются простыми вариантами автомата Патта.[15]
Ретроспективно автомат Патта можно рассматривать как пример техники «консервативного ландшафта» для конструирования обратимых клеточных автоматов. В этом методе изменение состояния ячейки запускается шаблоном среди набора соседей, которые сами не меняют состояния. Таким образом, существование одного и того же паттерна может быть использовано для запуска обратного изменения обращенной во времени динамики автомата. У автомата Патта очень простая динамика (все циклические последовательности конфигураций имеют длину два), но автоматы, использующие одну и ту же технику сохранения ландшафта с более чем одним шаблоном запуска, способны к более сложному поведению. В частности, они могут моделировать любой клеточный автомат второго порядка.[15]
СОЛЬ-модель Миллер и Фредкин (2005) является частным случаем консервативной ландшафтной техники. В этой модели ячейки целочисленной сетки делятся на четные и нечетные подмножества. На каждом временном шаге определенные пары ячеек одной четности меняются местами на основе конфигурации соседних ячеек другой четности. Правила, использующие эту модель, могут имитировать бильярдный шар компьютер,[16]или поддерживать длинные цепочки живых клеток, которые могут двигаться с разными скоростями или вибрировать с разными частотами.[17]
Теория
Клеточный автомат состоит из массива ячеек, каждая из которых имеет конечное число возможных состояния вместе с правилом одновременного обновления всех ячеек только на основе состояний соседних ячеек. А конфигурация клеточного автомата - это присвоение состояния каждой клетке автомата; правило обновления клеточного автомата образует функция от конфигураций к конфигурациям, с требованием, чтобы обновленное значение любой ячейки зависело только от некоторой конечной окрестности ячейки и чтобы функция была инвариантной при преобразованиях входного массива.
Согласно этим определениям, клеточный автомат является обратимым, если он удовлетворяет любому из следующих условий, все из которых математически эквивалентны друг другу:[18]
- Каждая конфигурация автомата имеет уникального предшественника, который сопоставлен с ней правилом обновления.
- Правило обновления автомата - это биекция; то есть функция, которая одновременно один к одному и на.
- Правило обновления - это инъективная функция, то есть не существует двух конфигураций, которые соответствуют одной и той же общей конфигурации. Это условие очевидно подразумевается из предположения, что правило обновления является биекцией. В другом направлении Теорема Эдемского сада для клеточных автоматов означает, что каждое правило инъективного обновления биективно.[19]
- Обращенную во времени динамику автомата можно описать другим клеточным автоматом. Очевидно, что для того, чтобы это было возможно, правило обновления должно быть биективным. С другой стороны, если правило обновления биективно, то у него есть обратная функция, которая также биективна. Эта обратная функция должна быть правилом клеточного автомата. Доказательство этого факта использует Теорема Кертиса – Хедлунда – Линдона., топологическая характеристика правил клеточных автоматов как трансляционно-инвариантных функций, которые непрерывный с уважением к Топология Кантора на пространстве конфигураций.[20]
- Правило обновления автомата - это автоморфизм динамической системы сдвигов, определяемой пространством состояний и трансляциями решетки ячеек. То есть это гомеоморфизм которое коммутирует с отображением сдвига, как следует из теоремы Кертиса – Хедлунда – Линдона.[21]
Ди Грегорио и Trautteur (1975) проанализировать несколько альтернативных определений обратимости клеточных автоматов. Большинство из них оказывается эквивалентным либо инъективности, либо сюръективности переходной функции автомата; однако есть еще одна альтернатива, которая не соответствует ни одному из этих двух определений. Это применимо к автоматам, таким как Игра Жизни, которые находятся в неподвижном или мертвом состоянии. В таком автомате можно определить конфигурацию как «конечную», если она имеет только конечное число нестационарных ячеек, и можно рассмотреть класс автоматов, для которых каждая конечная конфигурация имеет хотя бы одного конечного предшественника. Этот класс оказывается отличным как от сюръективных, так и от инъективных автоматов, и в некоторых последующих исследованиях автоматы с этим свойством были названы обратимые конечные автоматы.[22]
Проверка обратимости
Впервые это было показано Аморосо и Патт (1972) что проблема проверки обратимости заданного одномерного клеточного автомата имеет алгоритмическое решение. Альтернативные алгоритмы на основе теория автоматов и графы де Брейна были даны Кулик (1987) и Сатнер (1991), соответственно.
- Кулик начинает с наблюдения, что клеточный автомат имеет инъективную функцию перехода тогда и только тогда, когда функция перехода инъективна на подмножествах периодических конфигураций (повторение одной и той же подстроки бесконечно часто в обоих направлениях). Он определяет недетерминированную конечный преобразователь выполняющий правило перехода автомата на периодических строках. Этот преобразователь работает, запоминая окрестность автомата в начале строки и входя в принимающее состояние, когда эта окрестность, соединенная с концом ввода, приведет к тому, что его недетерминированно выбранные переходы будут правильными. Затем Кулик меняет местами вход и выход датчика. Преобразователь, полученный в результате этой замены, моделирует обратную динамику данного автомата. Наконец, Кулик применяет ранее известные алгоритмы, чтобы проверить, отображает ли полученный в результате замененный преобразователь каждый вход на один выход.[23]
- Сатнер определяет ориентированный граф (тип граф де Брейна ), в котором каждая вершина представляет собой пару назначений состояний для ячеек в непрерывной последовательности ячеек. Длина этой последовательности выбирается на единицу меньше размера окрестности автомата. Ребро в графе Сатнера представляет собой пару последовательностей ячеек, которые перекрываются во всех ячейках, кроме одной, так что объединение последовательностей является полной окрестностью в клеточном автомате. Каждое такое ребро направлено от перекрывающейся подпоследовательности слева к подпоследовательности справа. Ребра включаются в граф только тогда, когда они представляют совместимые назначения состояний на перекрывающихся частях их последовательностей ячеек, и когда автоматное правило (примененное к соседству, определяемому потенциальным ребром) даст одинаковые результаты для обоих назначений состояний. Выполняя линейное время сильная связь Анализируя этот граф, можно определить, какие из его вершин принадлежат циклам. Правило перехода неинъективно тогда и только тогда, когда этот граф содержит направленный цикл в котором хотя бы одна вершина имеет два различных назначения состояния.[8]
Эти методы принимают полиномиальное время, пропорциональной квадрату размера таблицы переходов состояний входного автомата.[24] Родственный алгоритм Хиллман (1991) определяет, является ли данное правило сюръективным при применении к массивам ячеек конечной длины с периодическими граничными условиями, и если да, то для каких длин.
Для блочного клеточного автомата проверить обратимость также несложно: автомат обратим тогда и только тогда, когда функция перехода на блоках автомата обратима, и в этом случае обратный автомат имеет ту же блочную структуру, что и функция обратного перехода.[10]
Однако для клеточных автоматов с другими окрестностями в двух или более измерениях проблема проверки обратимости неразрешимый, что означает, что не может существовать алгоритм, который всегда останавливается и всегда правильно решает проблему. Доказательство этого факта Кари (1990) основан на известной ранее неразрешимости замощения плоскости Ванская плитка, наборы квадратных плиток с отметками на краях, определяющими, какие пары плиток могут уместиться от края до края. Кари определяет клеточный автомат из набора плиток Ванга, так что автомат не может быть инъективным тогда и только тогда, когда данный набор плиток может покрывать всю плоскость. Его конструкция использует район фон Неймана, и ячейки с большим количеством состояний. В той же статье Кари также показал, что невозможно проверить, является ли данное правило клеточного автомата двух или более измерений сюръективным (то есть, имеет ли оно Эдемский сад ).
Обратный размер соседства
В одномерном обратимом клеточном автомате с п состояний на ячейку, в которых окрестность ячейки представляет собой интервал м клеток автомат, представляющий обратную динамику, имеет окрестности, состоящие не более чем из пм − 1 − м + 1 клетки. Эта граница, как известно, жесткая для м = 2: существуют п-состояние обратимых клеточных автоматов с двухклеточными окрестностями, чья обращенная во времени динамика образует клеточный автомат с размером окрестности точно п − 1.[25]
Для любого целого числа м имеется только конечное число двумерных обратимых м-состояние клеточных автоматов с окрестностью фон Неймана. Следовательно, существует вполне определенная функция ж(м) так что все перевертыши м-состояния клеточные автоматы с окрестностью фон Неймана используют окрестность с радиусом не более ж(м): просто позвольте ж(м) быть максимальным среди всего конечного числа обратимых м-состояние клеточного автомата, размер окрестности которого необходим для представления обращенной во времени динамики автомата. Однако из-за неразрешимости результата Кари не существует алгоритма для вычисления ж(м) и значения этой функции должны расти очень быстро, быстрее любого вычислимая функция.[12]
Классификация Вольфрама
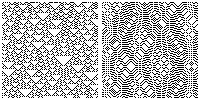
Известная классификация клеточных автоматов по Стивен Вольфрам изучает их поведение при случайных начальных условиях. Для обратимого клеточного автомата, если начальная конфигурация выбирается равномерно случайным образом среди всех возможных конфигураций, то такая же равномерная случайность продолжает сохраняться для всех последующих состояний. Таким образом, может показаться, что большинство обратимых клеточных автоматов относятся к классу 3 Вольфрама: автоматы, в которых почти все начальные конфигурации развиваются псевдослучайно или хаотично. Тем не менее, по-прежнему возможно различать различные обратимые клеточные автоматы, анализируя влияние локальных возмущений на поведение автомата. Внесение изменения в начальное состояние обратимого клеточного автомата может привести к тому, что изменения в более поздних состояниях останутся только в пределах ограниченной области, будут распространяться нерегулярно, но неограниченно или быстро распространяться, и Вольфрам (1984) перечисляет одномерные обратимые правила клеточного автомата, демонстрирующие все три типа поведения.
Более поздняя работа Вольфрама определяет одномерный Правило 37R автомат как особенно интересный в этом отношении. При работе с конечным массивом ячеек с периодическими граничными условиями, начиная с небольшого числа случайных ячеек, сосредоточенных в более крупной пустой окрестности, он имеет тенденцию колебаться между упорядоченным и хаотическим состояниями. Однако при одинаковых начальных условиях на неограниченном наборе ячеек его конфигурации имеют тенденцию организовываться в несколько типов простых движущихся частиц.[26]
Абстрактная алгебра
Другой способ формализации обратимых клеточных автоматов включает: абстрактная алгебра, и эта формализация была полезна при разработке компьютеризированных поисков правил обратимых клеточных автоматов. Бойкетт (2004) определяет полуцентральный бигрупоид быть алгебраической структурой, состоящей из множества S элементов и две операции → и ← на парах элементов, удовлетворяющих двум аксиомам уравнений:
- для всех элементов а, б, и c в S, (а → б) ← (б → c) = б, и
- для всех элементов а, б, и c в S, (а ← б) → (б ← c) = б.
Например, это верно для двух операций, в которых операция → возвращает свой правильный аргумент и операцию ← возвращает свой левый аргумент.
Как утверждает Бойкетт, любой одномерный обратимый клеточный автомат эквивалентен автомату в прямоугольная форма, в котором ячейки смещены на половину единицы на каждом временном шаге, и в котором как прямая, так и обратная эволюция автомата имеет окрестности, состоящие всего из двух ячеек, причем ячейки находятся на половине единицы в каждом направлении. Если обратимый автомат имеет окрестности, превышающие две ячейки, он может быть смоделирован обратимым автоматом с меньшими окрестностями и большим количеством состояний на ячейку, в котором каждая ячейка моделирующего автомата имитирует непрерывный блок ячеек в моделируемом автомате. Две аксиомы полуцентрального бигрупоида - это в точности условия, необходимые для того, чтобы функции прямого и обратного перехода этих двухклеточных окрестностей были обратными друг другу. То есть каждый полуцентральный бигрупоид определяет обратимый клеточный автомат в прямоугольной форме, в которой переходная функция автомата использует → операция для объединения двух ячеек его окрестности, и в которой ← аналогичным образом операция определяет обратную динамику автомата. Каждый одномерный обратимый клеточный автомат эквивалентен одному в этой форме.[5]
Бойкетт использовал эту алгебраическую формулировку в качестве основы для алгоритмов, которые исчерпывающе перечисляют все возможные неэквивалентные обратимые клеточные автоматы.[27]
Законы сохранения
Когда исследователи создают обратимые клеточные автоматы для моделирования физических систем, они обычно включают в проект законы сохранения системы; например, клеточный автомат, моделирующий идеальный газ, должен сохранять количество частиц газа и их общее количество. импульс, иначе это не обеспечило бы точное моделирование. Тем не менее, были также некоторые исследования законов сохранения, которые могут иметь обратимые клеточные автоматы, независимо от какого-либо намеренного замысла. Типичный тип сохраняемой величины, измеренной в этих исследованиях, принимает форму суммы по всем смежным подмножествам k ячейки автомата, от некоторой числовой функции состояний ячеек в каждом подмножестве. Такая величина сохраняется, если всякий раз, когда она принимает конечное значение, это значение автоматически остается постоянным на каждом временном шаге автомата, и в этом случае оно называется kинвариант автомата порядка-го порядка.[28]
Например, вспомним одномерный клеточный автомат, определенный как пример из прямоугольная полоса, в котором состояниями ячеек являются пары значений (л,р) взяты из множеств L и р левых значений и правых значений, левое значение каждой ячейки перемещается вправо на каждом временном шаге, а правое значение каждой ячейки перемещается влево. В этом случае для каждого левого или правого значения Икс полосы, можно определить сохраняемое количество, общее количество ячеек, которые имеют это значение. Если есть λ левые значения и ρ правильные значения, то есть λ + ρ − 2 независимые инварианты первого порядка, и любой инвариант первого порядка может быть представлен как линейная комбинация этих фундаментальных. Сохраняемые величины, связанные с левыми значениями, равномерно текут вправо с постоянной скоростью: то есть, если количество левых значений равно Икс в каком-то регионе C линии принимает определенное значение во время 0, то для сдвинутой области оно примет такое же значение C + т/2 вовремя т. Точно так же сохраняющиеся величины, связанные с правыми значениями, равномерно текут влево.[29]
Любой одномерный обратимый клеточный автомат можно придать прямоугольной форме, после чего его правило перехода может быть учтено в действии идемпотент полуцентральный бигрупоид (обратимое правило, для которого области ячеек с одним значением состояния изменяются только на их границах) вместе с перестановка на множестве состояний. Инварианты первого порядка для идемпотентный лифтинг правила автомата (модифицированное правило, образованное путем пропуска перестановки) обязательно ведут себя как правила для прямоугольной полосы: у них есть базис инвариантов, которые текут либо влево, либо вправо с постоянной скоростью без взаимодействия. Тогда инварианты первого порядка для всего автомата являются в точности инвариантами идемпотентного подъема, которые придают равный вес каждой паре состояний, принадлежащих одному и тому же орбита перестановки. Однако перестановка состояний в правиле может привести к тому, что эти инварианты будут вести себя иначе, чем в идемпотентном подъеме, протекая неравномерно и с взаимодействиями.[29]
В физических системах Теорема Нётер обеспечивает эквивалентность законов сохранения и симметрии системы. Однако для клеточных автоматов эта теорема не применима напрямую, потому что вместо того, чтобы руководствоваться энергия системы поведение автомата закодировано в ее правилах, и автомат гарантированно подчиняется определенным симметриям (трансляционной инвариантности как в пространстве, так и во времени) независимо от любых законов сохранения, которым он может подчиняться. Тем не менее, сохраняющиеся количества некоторых обратимых систем в некоторых отношениях ведут себя аналогично энергии. Например, если разные области автомата имеют разные средние значения некоторой сохраняющейся величины, правила автомата могут заставить эту величину рассеиваться, так что распределение величины будет более равномерным в более поздних состояниях. Using these conserved quantities as a stand-in for the energy of the system can allow it to be analyzed using methods from classical physics.[30]
Приложения
Lattice gas automata
А решетчатый газовый автомат is a cellular automaton designed to simulate the motion of particles in a fluid or an идеальный газ. In such a system, gas particles move on straight lines with constant velocity, until undergoing elastic collision with other particles. Lattice gas automata simplify these models by only allowing a constant number of velocities (typically, only one speed and either four or six directions of motion) and by simplifying the types of collision that are possible.[31]
В частности, HPP lattice gas model consists of particles moving at unit velocity in the four axis-parallel directions. When two particles meet on the same line in opposite directions, they collide and are sent outwards from the collision point on the perpendicular line. This system obeys the conservation laws of physical gases, and produces simulations whose appearance resembles the behavior of physical gases. However, it was found to obey unrealistic additional conservation laws. For instance, the total momentum within any single line is conserved. As well, the differences between axis-parallel and non-axis-parallel directions in this model (its анизотропия ) is undesirably high. В FHP lattice gas model improves the HPP model by having particles moving in six different directions, at 60 degree angles to each other, instead of only four directions. In any head-on collision, the two outgoing particles are deflected at 60 degree angles from the two incoming particles. Three-way collisions are also possible in the FHP model and are handled in a way that both preserves total momentum and avoids the unphysical added conservation laws of the HPP model.[31]
Because the motion of the particles in these systems is reversible, they are typically implemented with reversible cellular automata. In particular, both the HPP and FHP lattice gas automata can be implemented with a two-state block cellular automaton using the Margolus neighborhood.[31]
Модель Изинга
В Модель Изинга is used to model the behavior of magnetic systems. It consists of an array of cells, the state of each of which represents a вращение, либо вверх или же вниз. The energy of the system is measured by a function that depends on the number of neighboring pairs of cells that have the same spin as each other. Therefore, if a cell has equal numbers of neighbors in the two states, it may flip its own state without changing the total energy. However, such a flip is energy-conserving only if no two adjacent cells flip at the same time.[32]
Cellular automaton models of this system divide the square lattice into two alternating subsets, and perform updates on one of the two subsets at a time. In each update, every cell that can flip does so. This defines a reversible cellular automaton which can be used to investigate the Ising model.[32]
Billiard ball computation and low-power computing
Fredkin & Toffoli (1982) proposed the billiard-ball computer as part of their investigations into обратимые вычисления. A billiard-ball computer consists of a system of synchronized particles (the billiard balls) moving in tracks and guided by a fixed set of obstacles. When the particles collide with each other or with the obstacles, they undergo an elastic collision much as real бильярдные шары would do. The input to the computer is encoded using the presence or absence of particles on certain input tracks, and its output is similarly encoded using the presence or absence of particles on output tracks. The tracks themselves may be envisioned as wires, and the particles as being Boolean signals transported on those wires. When a particle hits an obstacle, it reflects from it. This reflection may be interpreted as a change in direction of the wire the particle is following. Two particles on different tracks may collide, forming a logic gate at their collision point.[33]
В качестве Margolus (1984) showed, billiard-ball computers may be simulated using a two-state reversible block cellular automaton with the Margolus neighborhood. In this automaton's update rule, blocks with exactly one live cell rotate by 180°, blocks with two diagonally opposite live cells rotate by 90°, and all other blocks remain unchanged. These rules cause isolated live cells to behave like billiard balls, moving on diagonal trajectories. Connected groups of more than one live cell behave instead like the fixed obstacles of the billiard-ball computer. In an appendix, Margolus also showed that a three-state second-order cellular automaton using the two-dimensional Moore neighborhood could simulate billiard-ball computers.
| Нерешенная проблема в математике: Is every three-dimensional reversible cellular automaton locally reversible? (больше нерешенных задач по математике) |
One reason to study reversible universal models of computation such as the billiard-ball model is that they could theoretically lead to actual computer systems that consume very low quantities of energy. В соответствии с Принцип Ландауэра, irreversible computational steps require a certain minimal amount of energy per step, but reversible steps can be performed with an amount of energy per step that is arbitrarily close to zero.[34] However, in order to perform computation using less energy than Landauer's bound, it is not good enough for a cellular automaton to have a transition function that is globally reversible: what is required is that the local computation of the transition function also be done in a reversible way. For instance, reversible block cellular automata are always locally reversible: the behavior of each individual block involves the application of an invertible function with finitely many inputs and outputs. Toffoli & Margolus (1990) were the first to ask whether every reversible cellular automaton has a locally reversible update rule. Kari (1996) showed that for one- and two-dimensional automata the answer is positive, and Durand-Lose (2001) showed that any reversible cellular automaton could be simulated by a (possibly different) locally reversible cellular automaton. However, the question of whether every reversible transition function is locally reversible remains open for dimensions higher than two.[35]
Синхронизация

The "Tron" rule of Toffoli and Margolus is a reversible block cellular rule with the Margolus neighborhood. When a 2 × 2 block of cells all have the same state, all cells of the block change state; in all other cases, the cells of the block remain unchanged. As Toffoli and Margolus argue, the evolution of patterns generated by this rule can be used as a clock to synchronize any other rule on the Margolus neighborhood. A cellular automaton synchronized in this way obeys the same dynamics as the standard Margolus-neighborhood rule while running on an asynchronous cellular automaton.[36]
Шифрование
Kari (1990) proposed using multidimensional reversible cellular automata as an шифрование система. In Kari's proposal, the cellular automaton rule would be the encryption key. Encryption would be performed by running the rule forward one step, and decryption would be performed by running it backward one step. Kari suggests that a system such as this may be used as a public-key cryptosystem. In principle, an attacker could not algorithmically determine the decryption key (the reverse rule) from a given encryption key (forward rule) because of the undecidability of testing reversibility, so the forward rule could be made public without compromising the security of the system. However, Kari did not specify which types of reversible cellular automaton should be used for such a system, or show how a cryptosystem using this approach would be able to generate encryption/decryption key pairs.
Chai, Cao & Zhou (2005) have proposed an alternative encryption system. In their system, the encryption key determines the local rule for each cell of a one-dimensional cellular automaton. A second-order automaton based on that rule is run for several rounds on an input to transform it into an encrypted output. The reversibility property of the automaton ensures that any encrypted message can be decrypted by running the same system in reverse. In this system, keys must be kept secret, because the same key is used both for encryption and decryption.
Квантовые вычисления
Quantum cellular automata are arrays of automata whose states and state transitions obey the laws of квантовая динамика. Quantum cellular automata were suggested as a model of computation by Feynman (1982) and first formalized by Watrous (1995). Several competing notions of these automata remain under research, many of which require that the automata constructed in this way be reversible.[37]
Physical universality
Janzing (2010) asked whether it was possible for a cellular automaton to be physically universal, meaning that, for any bounded region of the automaton's cells, it should be possible to surround that region with cells whose states form an appropriate support scaffolding that causes the automaton to implement any arbitrary transformation on sets of states within the region. Such an automaton must be reversible, or at least locally injective, because automata without this property have Garden of Eden patterns, and it is not possible to implement a transformation that creates a Garden of Eden.
Schaeffer (2015) constructed a reversible cellular automaton that is physically universal in this sense. Schaeffer's automaton is a block cellular automaton with two states and the Margolis neighborhood, closely related to the automata for the billiard ball model and for the HPP lattice gas. However, the billiard ball model is not physically universal, as it can be used to construct impenetrable walls preventing the state within some region from being read and transformed. In Schaeffer's model, every pattern eventually decomposes into particles moving diagonally in four directions. Thus, his automaton is not Тьюринг завершен. However, Schaeffer showed that it is possible to surround any finite configuration by scaffolding that decays more slowly than it. After the configuration decomposes into particles, the scaffolding intercepts those particles, and uses them as the input to a system of Boolean circuits constructed within the scaffolding. These circuits can be used to compute arbitrary functions of the initial configuration. The scaffolding then translates the output of the circuits back into a system of moving particles, which converge on the initial region and collide with each other to build a copy of the transformed state. In this way, Schaeffer's system can be used to apply any function to any bounded region of the state space, showing that this automaton rule is physically universal.[38]
Примечания
- ^ Вольфрам (2002), п. 1018.
- ^ Schiff (2008), п. 44.
- ^ Toffoli & Margolus (1990).
- ^ Blanchard, Devaney & Keen (2004), п. 38: "The shift map is without doubt the fundamental object in symbolic dynamics."
- ^ а б Boykett (2004).
- ^ Вольфрам (2002), п. 1093.
- ^ Patt (1971).
- ^ а б Sutner (1991).
- ^ а б c Toffoli & Margolus (1987), section 12.8.2, "Critters", pp. 132–134; Margolus (1999); Marotta (2005).
- ^ а б c Toffoli & Margolus (1987), Section 14.5, "Partitioning technique", pp. 150–153; Schiff (2008), Section 4.2.1, "Partitioning Cellular Automata", pp. 115–116.
- ^ Toffoli & Margolus (1987), Chapter 12, "The Margolus Neighborhood", pp. 119–138.
- ^ а б Kari (2005).
- ^ Margolus (1984); Vichniac (1984); Wolfram (1984).
- ^ а б c Toffoli & Margolus (1987), Section 14.2, "Second-order technique", pp. 147–149. Вольфрам (2002), pp. 437ff. McIntosh (2009).
- ^ а б Toffoli & Margolus (1990), section 5.3, "Conserved-landscape permutations", pp. 237–238.
- ^ Miller & Fredkin (2005).
- ^ Miller & Fredkin (2012).
- ^ In the one-dimensional case, several of these equivalences were already presented, in the language of dynamical systems rather than cellular automata, by Hedlund (1969), Theorem 4.1. For higher dimensions, see Richardson (1972) и Di Gregorio & Trautteur (1975).
- ^ Myhill (1963).
- ^ Richardson (1972).
- ^ Hedlund (1969).
- ^ Moraal (2000).
- ^ Culik cites a 1979 automata theory textbook for this result, but see Béal et al. (2003) for more recent developments on efficiently testing whether a transducer defines a function.
- ^ Ни один Amoroso & Patt (1972) ни Culik (1987) state their algorithms' time complexities explicitly, but Sutner (1991) does, and this bound can also be found e.g. в Czeizler & Kari (2007).
- ^ Kari (1992); Czeizler (2004); Czeizler & Kari (2007).
- ^ Вольфрам (2002), pp. 454–457.
- ^ Boykett (2004). Видеть Hillman (1991) и Seck Tuoh Mora et al. (2005) for closely related work on the enumeration of width-2 reversible cellular automata.
- ^ Hattori & Takesue (1991); Fukś (2007).
- ^ а б Boykett, Kari & Taati (2008).
- ^ Pomeau (1984); Takesue (1990); Capobianco & Toffoli (2011).
- ^ а б c Toffoli & Margolus (1987), Chapter 16, "Fluid dynamics", pp. 172–184.
- ^ а б Toffoli & Margolus (1987), Chapter 17.2, "Ising systems", pp. 186–190.
- ^ Durand-Lose (2002).
- ^ Fredkin & Toffoli (1982).
- ^ Kari (2005, 2009 )
- ^ Toffoli & Margolus (1987), Section 12.8.3, "Asynchronous computation", pp. 134–136.
- ^ Meyer (1996); Schumacher & Werner (2004); Shepherd, Franz & Werner (2006); Nagaj & Wocjan (2008).
- ^ Смотрите также "A Physically Universal Cellular Automaton ", Shtetl-Optimized, Скотт Ааронсон, 26 июня 2014 г.
Рекомендации
- Amoroso, S.; Patt, Y. N. (1972), "Decision procedures for surjectivity and injectivity of parallel maps for tessellation structures", Журнал компьютерных и системных наук, 6 (5): 448–464, Дои:10.1016/S0022-0000(72)80013-8, МИСТЕР 0317852.
- Béal, Marie-Pierre; Картон, Оливье; Prieur, Christophe; Sakarovitch, Jacques (2003), "Squaring transducers: an efficient procedure for deciding functionality and sequentiality", Теоретическая информатика, 292 (1): 45–63, Дои:10.1016/S0304-3975(01)00214-6, МИСТЕР 1964625.
- Blanchard, Paul; Devaney, Robert L.; Кин, Линда (2004), "Complex dynamics and symbolic dynamics", in Williams, Susan G. (ed.), Symbolic Dynamics and its Applications, Proceedings of Symposia in Applied Mathematics, 60, Providence, RI: American Mathematical Society, pp. 37–60, Дои:10.1090/psapm/060/2078845, МИСТЕР 2078845.
- Boykett, Tim (2004), "Efficient exhaustive listings of reversible one dimensional cellular automata", Теоретическая информатика, 325 (2): 215–247, Дои:10.1016/j.tcs.2004.06.007, МИСТЕР 2086738.
- Boykett, Tim; Кари, Яркко; Taati, Siamak (2008), "Conservation laws in rectangular CA" (PDF), Журнал клеточных автоматов, 3 (2): 115–122, МИСТЕР 2394641, заархивировано из оригинал (PDF) в 2015-09-30.
- Capobianco, Silvio; Тоффоли, Томмазо (2011), "Can anything from Noether's theorem be salvaged for discrete dynamical systems?", Proceedings of the 10th International Conference on Unconventional Computation (UC 2011), Конспект лекций по информатике, 6714, Springer-Verlag, pp. 77–88, arXiv:1103.4785, Дои:10.1007/978-3-642-21341-0_13.
- Chai, Zhenchuan; Cao, Zhenfu; Zhou, Yuan (2005), "Encryption based on reversible second-order cellular automata", Parallel and Distributed Processing and Applications (ISPA 2005 Workshops), Конспект лекций по информатике, 3759, Springer-Verlag, pp. 350–358, Дои:10.1007/11576259_39.
- Culik, Karel, II (1987), "On invertible cellular automata" (PDF), Сложные системы, 1 (6): 1035–1044, МИСТЕР 0931401.
- Czeizler, Eugen (2004), "On the size of the inverse neighborhoods for one-dimensional reversible cellular automata", Теоретическая информатика, 325 (2): 273–284, Дои:10.1016/j.tcs.2004.06.009, МИСТЕР 2086740.
- Czeizler, Eugen; Кари, Яркко (2007), "A tight linear bound on the synchronization delay of bijective automata", Теоретическая информатика, 380 (1–2): 23–36, Дои:10.1016/j.tcs.2007.02.052, МИСТЕР 2330639.
- Di Gregorio, S.; Trautteur, G. (1975), "On reversibility in cellular automata", Журнал компьютерных и системных наук, 11 (3): 382–391, Дои:10.1016/S0022-0000(75)80059-6, МИСТЕР 0392201.
- Durand-Lose, Jérôme (2001), "Representing reversible cellular automata with reversible block cellular automata", Discrete models: combinatorics, computation, and geometry (Paris, 2001), Discrete Math. Теор. Comput. Sci. Proc., AA, Maison Inform. Математика. Discrèt. (MIMD), Paris, pp. 145–154, МИСТЕР 1888769.
- Durand-Lose, Jérôme (2002), "Computing inside the billiard ball model", in Adamatzky, Andrew (ред.), Collision-Based Computing, Springer-Verlag, pp. 135–160.
- Feynman, Richard P. (1982), "Simulating physics with computers", International Journal of Theoretical Physics, 21 (6–7): 467–488, Bibcode:1982IJTP...21..467F, Дои:10.1007/BF02650179, МИСТЕР 0658311, S2CID 124545445.
- Фредкин, Эдвард; Тоффоли, Томмазо (1982), "Conservative logic", International Journal of Theoretical Physics, 21 (3–4): 219–253, Bibcode:1982IJTP...21..219F, Дои:10.1007/BF01857727, МИСТЕР 0657156, S2CID 37305161. Перепечатано в Adamatzky, Andrew, изд. (2002), Collision-Based Computing, Springer-Verlag, pp. 47–82.
- Fukś, Henryk (2007), "Remarks on the critical behavior of second order additive invariants in elementary cellular automata", Fundamenta Informaticae, 78 (3): 329–341, arXiv:nlin/0502037, Bibcode:2005nlin......2037F, МИСТЕР 2346870.
- Hattori, Tetsuya; Takesue, Shinji (1991), "Additive conserved quantities in discrete-time lattice dynamical systems", Physica D: нелинейные явления, 49 (3): 295–322, Bibcode:1991PhyD...49..295H, Дои:10.1016/0167-2789(91)90150-8, МИСТЕР 1115865.
- Hedlund, G. A. (1969), "Endomorphisms and automorphisms of the shift dynamical systems", Mathematical Systems Theory, 3 (4): 320–375, Дои:10.1007/BF01691062, МИСТЕР 0259881, S2CID 21803927.
- Hertling, Peter (1998), "Embedding cellular automata into reversible ones", Unconventional models of computation (Auckland, 1998), Springer Series in Discrete Mathematics and Theoretical Computer Science, Springer-Verlag, pp. 243–256, МИСТЕР 1653663.
- Hillman, David (1991), "The structure of reversible one-dimensional cellular automata", Physica D: нелинейные явления, 52 (2–3): 277–292, Bibcode:1991PhyD...52..277H, Дои:10.1016/0167-2789(91)90128-V, МИСТЕР 1128996.
- Janzing, Dominik (2010), Is there a physically universal cellular automaton or Hamiltonian?, arXiv:1009.1720, Bibcode:2010arXiv1009.1720J.
- Кари, Яркко (1990), "Reversibility of 2D cellular automata is undecidable", Cellular automata: theory and experiment (Los Alamos, NM, 1989), Physica D: нелинейные явления, 45 (1–3): 379–385, Bibcode:1990 ФИД ... 45..379K, Дои:10.1016/0167-2789(90)90195-U, МИСТЕР 1094882.
- Кари, Яркко (1992), "On the inverse neighborhoods of reversible cellular automata", Lindenmayer Systems: Impacts on Theoretical Computer Science, Computer Graphics, and Developmental Biology, Springer-Verlag, pp. 477–495, МИСТЕР 1226709.
- Кари, Яркко (1996), "Representation of reversible cellular automata with block permutations", Mathematical Systems Theory, 29 (1): 47–61, Дои:10.1007/BF01201813, МИСТЕР 1360196, S2CID 31986003.
- Кари, Яркко (2005), "Reversible cellular automata" (PDF), Developments in Language Theory: 9th International Conference, DLT 2005, Palermo, Italy, July 4–8, 2005, Proceedings, Конспект лекций по информатике, 3572, Springer-Verlag, pp. 2–23, Дои:10.1007/11505877_5, МИСТЕР 2187250.
- Кари, Яркко (2009), "Structure of reversible cellular automata", Unconventional Computation: 8th International Conference, UC 2009, Ponta Delgada, Portugal, September 7–11, 2009, Proceedings, Конспект лекций по информатике, 5715, Springer-Verlag, стр. 6, Bibcode:2009LNCS.5715....6K, Дои:10.1007/978-3-642-03745-0_5, МИСТЕР 2539690.
- Margolus, Norman (1984), "Physics-like models of computation", Physica D: нелинейные явления, 10 (1–2): 81–95, Bibcode:1984PhyD...10...81M, Дои:10.1016/0167-2789(84)90252-5, МИСТЕР 0762656. Перепечатано в Вольфрам, Стивен (1986), Теория и приложения клеточных автоматов, Расширенная серия по сложным системам, 1, World Scientific, стр. 232–246., И в Adamatzky, Andrew, изд. (2002), Collision-Based Computing, Springer-Verlag, pp. 83–104.
- Margolus, Norman (1999), "Crystalline computation", in Hey, Anthony J. G. (ed.), Feynman and Computation, Perseus Books, pp. 267–305, arXiv:comp-gas/9811002, Bibcode:1998comp.gas.11002M.
- Marotta, Sebastian M. (2005), "Living in Critters' world", Revista Ciências Exatas e Naturais, 7 (1), заархивировано из оригинал на 2012-03-19.
- McIntosh, Harold V. (2009), "12. Reversible cellular automata", One Dimensional Cellular Automata, Luniver Press, pp. 205–246.
- Meyer, David A. (1996), "From quantum cellular automata to quantum lattice gases", Журнал статистической физики, 85 (5–6): 551–574, arXiv:quant-ph/9604003, Bibcode:1996JSP....85..551M, Дои:10.1007/BF02199356, МИСТЕР 1418805, S2CID 661940.
- Miller, Daniel B.; Фредкин, Эдвард (2005), "Two-state, reversible, universal cellular automata in three dimensions", Proceedings of the 2nd Conference on Computing Frontiers (CF '05), New York, NY, USA: ACM, pp. 45–51, arXiv:nlin/0501022, Дои:10.1145/1062261.1062271, ISBN 1-59593-019-1, S2CID 14082792.
- Miller, Daniel B.; Фредкин, Эдвард (2012), Circular motion of strings in cellular automata, and other surprises, arXiv:1206.2060, Bibcode:2012arXiv1206.2060M.
- Moraal, Hendrik (2000), "Graph-theoretical characterization of invertible cellular automata", Physica D: нелинейные явления, 141 (1–2): 1–18, Bibcode:2000PhyD..141....1M, Дои:10.1016/S0167-2789(00)00020-8, МИСТЕР 1764165.
- Morita, Kenichi (1995), "Reversible simulation of one-dimensional irreversible cellular automata", Теоретическая информатика, 148 (1): 157–163, Дои:10.1016/0304-3975(95)00038-X, МИСТЕР 1347674.
- Myhill, Джон (1963), "The converse of Moore's Garden-of-Eden theorem", Труды Американского математического общества, 14 (4): 685–686, Дои:10.2307/2034301, JSTOR 2034301, МИСТЕР 0155764. Перепечатано в Burks, Arthur W. (1970), Essays on Cellular Automata, University of Illinois Press, pp. 204–205.
- Nagaj, Daniel; Wocjan, Pawel (2008), "Hamiltonian quantum cellular automata in one dimension", Физический обзор A, 78 (3): 032311, arXiv:0802.0886, Bibcode:2008PhRvA..78c2311N, Дои:10.1103/PhysRevA.78.032311, S2CID 18879990.
- Patt, Y. N. (1971), Injections of neighborhood size three and four on the set of configurations from the infinite one-dimensional tessellation automata of two-state cells, Technical Report ECON-N1-P-1, Ft. Monmouth, NJ 07703. Как цитирует Amoroso & Patt (1972) и Toffoli & Margolus (1990).
- Pomeau, Y. (1984), "Invariants in cellular automata", Журнал физики A: математические и общие, 17 (8): L415–L418, Bibcode:1984JPhA...17L.415P, Дои:10.1088/0305-4470/17/8/004, МИСТЕР 0750565.
- Richardson, D. (1972), "Tessellations with local transformations", Журнал компьютерных и системных наук, 6 (5): 373–388, Дои:10.1016/S0022-0000(72)80009-6, МИСТЕР 0319678.
- Schaeffer, Luke (2015), "A physically universal cellular automaton", Proceedings of the 6th Innovations in Theoretical Computer Science Conference (ITCS 2015), Ассоциация вычислительной техники, pp. 237–246, Дои:10.1145/2688073.2688107, S2CID 16903144, ECCC TR14-084.
- Schiff, Joel L. (2008), Клеточные автоматы: дискретный взгляд на мир, Вайли, ISBN 978-0-470-16879-0.
- Schumacher, B.; Werner, R. F. (2004), Reversible quantum cellular automata, arXiv:quant-ph/0405174, Bibcode:2004quant.ph..5174S.
- Seck Tuoh Mora, Juan Carlos; Chapa Vergara, Sergio V.; Juárez Martínez, Genaro; McIntosh, Harold V. (2005), "Procedures for calculating reversible one-dimensional cellular automata" (PDF), Physica D: нелинейные явления, 202 (1–2): 134–141, Bibcode:2005PhyD..202..134S, Дои:10.1016/j.physd.2005.01.018, МИСТЕР 2131890.
- Shepherd, D. J.; Franz, T.; Werner, R. F. (2006), "A universally programmable quantum cellular automaton", Письма с физическими проверками, 97 (2): 020502, arXiv:quant-ph/0512058, Bibcode:2006PhRvL..97b0502S, Дои:10.1103/PhysRevLett.97.020502, PMID 16907423, S2CID 40900768.
- Sutner, Klaus (1991), "De Bruijn graphs and linear cellular automata" (PDF), Сложные системы, 5: 19–30, МИСТЕР 1116419.
- Takesue, Shinji (1990), "Relaxation properties of elementary reversible cellular automata", Cellular automata: theory and experiment (Los Alamos, NM, 1989), Physica D: нелинейные явления, 45 (1–3): 278–284, Bibcode:1990 ФИД ... 45..379K, Дои:10.1016/0167-2789(90)90195-U, МИСТЕР 1094882.
- Тоффоли, Томмазо (1977), "Computation and construction universality of reversible cellular automata", Журнал компьютерных и системных наук, 15 (2): 213–231, Дои:10.1016/S0022-0000(77)80007-X, МИСТЕР 0462816.
- Тоффоли, Томмазо; Margolus, Norman (1987), Cellular Automata Machines: A New Environment for Modeling, MIT Press, ISBN 9780262200608.
- Тоффоли, Томмазо; Margolus, Norman (1990), "Invertible cellular automata: a review", Physica D: нелинейные явления, 45 (1–3): 229–253, Bibcode:1990PhyD...45..229T, Дои:10.1016/0167-2789(90)90185-R, МИСТЕР 1094877.
- Vichniac, Gérard Y. (1984), "Simulating physics with cellular automata", Physica D: нелинейные явления, 10 (1–2): 96–115, Bibcode:1984PhyD...10...96V, Дои:10.1016/0167-2789(84)90253-7, МИСТЕР 0762657.
- Watrous, John (1995), "On one-dimensional quantum cellular automata", Proceedings of the 36th Annual Symposium on Foundations of Computer Science (Milwaukee, WI, 1995), Los Alamitos, CA: IEEE Computer Society Press, pp. 528–537, Дои:10.1109/SFCS.1995.492583, МИСТЕР 1619103, S2CID 7441203.
- Вольфрам, Стивен (1984), "Cellular automata as models of complexity" (PDF), Природа, 311 (5985): 419–424, Bibcode:1984Natur.311..419W, Дои:10.1038/311419a0, S2CID 4237923.
- Вольфрам, Стивен (2002), Новый вид науки, Wolfram Media, ISBN 1-57955-008-8, МИСТЕР 1920418