Линеаризация - Linearization
В математика, линеаризация находит линейное приближение к функция в заданной точке. Линейная аппроксимация функции - это первый порядок Расширение Тейлора вокруг достопримечательности. При изучении динамические системы, линеаризация - это метод оценки локальных стабильность из точка равновесия из система из нелинейный дифференциальные уравнения или дискретный динамические системы.[1] Этот метод используется в таких областях, как инженерное дело, физика, экономика, и экология.
Линеаризация функции
Линеаризации функция находятся линии - обычно линии, которые можно использовать для расчетов. Линеаризация - эффективный метод аппроксимации вывода функции. в любом исходя из стоимости и склон функции при , при условии дифференцируема на (или же ) и что близко к . Короче говоря, линеаризация аппроксимирует выход функции около .




![[а, б]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)
![[б, а]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3015146003c7dab01d939e34e07159fa9604bc3)


Например, . Однако то, что было бы хорошим приближением к ?


Для любой заданной функции , может быть аппроксимирован, если он находится вблизи известной дифференцируемой точки. Самым основным требованием является то, что , куда является линеаризацией в . В точечно-наклонная форма уравнения образует уравнение прямой, заданной точкой и наклон . Общая форма этого уравнения: .





Используя точку , становится . Поскольку дифференцируемые функции локально линейный, лучшим уклоном для замены будет наклон линии касательная к в .


Хотя концепция локальной линейности больше всего применима к точкам произвольно закрыть к , те относительно близкие работают относительно хорошо для линейных приближений. Склон должен быть, наиболее точно, наклон касательной в точке .
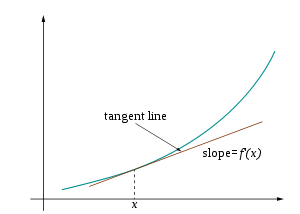
Визуально на прилагаемой диаграмме показана касательная в . В , куда любое небольшое положительное или отрицательное значение, очень близко к значению касательной в точке .




Окончательное уравнение линеаризации функции при является:

За , . В производная из является , а наклон в является .



Пример
Найти , мы можем использовать тот факт, что . Линеаризация в является , поскольку функция определяет наклон функции в . Подставляя в , линеаризация в 4 имеет вид . В этом случае , так примерно . Истинное значение близко к 2.00024998, поэтому приближение линеаризации имеет относительную ошибку менее 1 миллионной доли процента.








Линеаризация функции многих переменных
Уравнение линеаризации функции в какой-то момент является:



Общее уравнение линеаризации функции многих переменных в какой-то момент является:



куда - вектор переменных, а представляет интерес для линеаризации.[2]

Использование линеаризации
Линеаризация дает возможность использовать инструменты для обучения линейные системы для анализа поведения нелинейной функции вблизи заданной точки. Линеаризация функции - это член первого порядка ее Расширение Тейлора вокруг достопримечательности. Для системы, определяемой уравнением
- ,

линеаризованная система может быть записана как

куда это достопримечательность и это Якобиан из оценивается в .



Анализ устойчивости
В стабильность анализ автономные системы, можно использовать собственные значения из Матрица якобиана оценивается на точка гиперболического равновесия чтобы определить природу этого равновесия. Это содержание теорема линеаризации. Для нестационарных систем линеаризация требует дополнительного обоснования.[3]
Микроэкономика
В микроэкономика, правила принятия решений можно аппроксимировать в рамках подхода к линеаризации в пространстве состояний.[4] При таком подходе Уравнения Эйлера из проблема максимизации полезности линеаризованы вокруг стационарного установившегося состояния.[4] Затем находится единственное решение полученной системы динамических уравнений.[4]
Оптимизация
В математическая оптимизация, функции затрат и нелинейные компоненты внутри могут быть линеаризованы для применения метода линейного решения, такого как Симплексный алгоритм. Оптимизированный результат достигается намного эффективнее и детерминирован как глобальный оптимум.
Мультифизика
В мультифизика системы - системы, включающие несколько физических полей, которые взаимодействуют друг с другом, - может выполняться линеаризация по каждому из физических полей. Эта линеаризация системы по отношению к каждому из полей приводит к линеаризованной системе монолитных уравнений, которую можно решить с помощью процедур монолитного итерационного решения, таких как Ньютон-Рафсон метод. Примеры этого включают МРТ сканер системы, которые приводят к системе электромагнитных, механических и акустических полей.[5]
Смотрите также
- Линейная устойчивость
- Матрица касательной жесткости
- Производные устойчивости
- Теорема линеаризации
- Приближение Тейлора
- Функциональное уравнение (L-функция)
Рекомендации
- ^ Проблема линеаризации в сложных динамических системах размерности один в Scholarpedia
- ^ Линеаризация. Университет Джона Хопкинса. Кафедра электротехники и вычислительной техники В архиве 2010-06-07 на Wayback Machine
- ^ Леонов, Г. А .; Кузнецов, Н. В. (2007). «Нестационарная линеаризация и эффекты Перрона». Международный журнал бифуркаций и хаоса. 17 (4): 1079–1107. Bibcode:2007IJBC ... 17.1079L. Дои:10.1142 / S0218127407017732.
- ^ а б c Моффатт, Майк. (2008) About.com Государственно-космический подход Глоссарий экономики; Условия, начиная с S. По состоянию на 19 июня 2008 г.
- ^ Bagwell, S .; Ledger, P. D .; Gil, A.J .; Mallett, M .; Круип, М. (2017). "Линеаризованный л.с.–Конечно-элементный каркас для акустомагнитомеханической связи в осесимметричных МРТ сканерах ». Международный журнал численных методов в инженерии. 112 (10): 1323–1352. Bibcode:2017IJNME.112.1323B. Дои:10.1002 / nme.5559.