Активная матрица с электронным сканированием - Active electronically scanned array

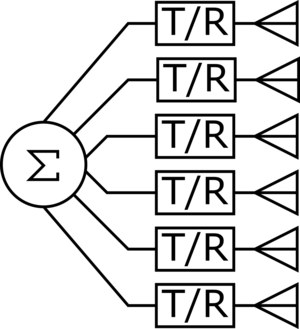
An активная матрица с электронным сканированием (AESA) является разновидностью фазированная решетка антенна, управляемая компьютером антенная решетка в котором луч радиоволн может быть направлен в разные стороны с помощью электроники, не перемещая антенну. В AESA каждый антенный элемент подключен к небольшому твердотельному модулю приема / передачи (TRM) под управлением компьютера, который выполняет функции передатчик и / или приемник для антенны. Это контрастирует с пассивная матрица с электронным сканированием (PESA), в котором все элементы антенны подключены к одному передатчику и / или приемнику через фазовращатели под управлением компьютера. Основное применение AESA - радар, и они известны как активная РЛС с фазированной антенной решеткой (APAR).
AESA - это более совершенное и сложное второе поколение оригинальной технологии фазированных решеток PESA. PESA могут излучать только один луч радиоволн на одной частоте за раз. AESA может излучать несколько лучей радиоволн одновременно на нескольких частотах. Радары AESA могут распространять излучение своего сигнала в более широком диапазоне частот, что затрудняет их обнаружение в фоновый шум, позволяя кораблям и самолетам излучать мощные радиолокационные сигналы, оставаясь незаметным, а также более устойчивым к помехам.
История
Примеры и перспективы в этом разделе может не представлять мировое мнение предмета. (Ноябрь 2015) (Узнайте, как и когда удалить этот шаблон сообщения) |



Bell Labs предложил заменить Nike Zeus РЛС с фазированной антенной решеткой в 1960 году, и в июне 1961 года было дано добро на разработку. Результатом стал Zeus Multi-function Array Radar (ZMAR), ранний пример активной радарной системы с электронным управлением.[1] ZMAR стал MAR, когда программа Zeus закончилась в пользу Nike-X в 1963 году. MAR (Многофункциональный радар с решеткой) состоял из большого количества небольших антенн, каждая из которых была подключена к отдельному передатчику или приемнику с компьютерным управлением. Используя различные формирование луча и обработка сигналов Этапы, одна MAR могла выполнять обнаружение на большом расстоянии, генерирование треков, распознавание боеголовок от ложных целей и отслеживание исходящих ракет-перехватчиков.[2] MAR позволял управлять всей битвой на большом пространстве с одного места. Каждый MAR и связанный с ним боевой центр будут обрабатывать треки для сотен целей. Затем система выберет наиболее подходящую батарею для каждого из них и передаст им определенные цели для атаки. Одна батарея обычно связана с MAR, а другие - вокруг нее. Удаленные батареи были оснащены гораздо более простым радаром, основной целью которого было отслеживание исходящих Спринт-ракеты прежде, чем они стали видимыми для потенциально далеких MAR. Эти меньшие по размеру радары ракетной площадки (MSR) проходили пассивное сканирование, формируя только один луч вместо множества лучей MAR.[2]
Первый советский АПАР, 5Н65, разрабатывался в 1963-1965 годах в составе системы ПРО С-225. После некоторых доработок концепции системы в 1967 г. она была построена на Сары Шаган Испытательный полигон 1970-1971 годов и прозванный на Западе Flat Twin. Четыре года спустя был построен еще один радар этой конструкции. Кура Испытательный полигон, а система С-225 так и не была введена в строй.[нужна цитата ]
- Первым военным наземным AESA был J / FPS-3 который вступил в полную силу с 45-й авиационной группой управления и предупреждения Силы самообороны Японии в 1995 г.
- Первым серийным корабельным AESA был ОПС-24, а радар управления огнем представлен на японском Асагириэсминец класса DD-155 Хамагири запущен в 1988 году.[3]
- Первым серийным самолетом AESA стал EL / M-2075 Phalcon на Боинг 707 из Чилийские ВВС который поступил на вооружение в 1994 году.
- Первым АФАР на боевом самолете был J / APG-1 представлен на Митсубиси Ф-2 в 1995 г.[4]
- Первый AESA на ракете - это головка ГСН для AAM-4B, ракета класса "воздух-воздух" несущие Mitsubishi F-2 и построенный Mitsubishi McDonnell-Douglas F-15J.[4]
Американские производители радаров AESA, используемых в F-22 и Super Hornet, включают Northrop Grumman.[5] и Raytheon.[6] Эти компании также проектируют, разрабатывают и производят передающие / приемные модули, которые составляют «строительные блоки» радара AESA. Необходимая электронная технология была разработана собственными силами в рамках исследовательских программ Министерства обороны США, таких как MMIC Программа.[7][8]
Основная концепция
Радиолокационные системы обычно работают путем подключения антенны к мощному радиопередатчику, излучающего короткий импульс сигнала. Затем передатчик отключается, а антенна подключается к чувствительному приемнику, который усиливает любые эхо-сигналы от целевых объектов. Измеряя время, необходимое для возврата сигнала, приемник радара может определить расстояние до объекта. Затем получатель отправляет полученный результат в отображение какого-то. Элементы передатчика обычно клистроновые трубки или же магнетроны, которые подходят для усиления или генерации узкого диапазона частот до высоких уровней мощности. Чтобы сканировать часть неба, антенну радара необходимо физически перемещать в разные стороны.
Начиная с 1960-х годов новые твердое состояние были внедрены устройства, способные задерживать сигнал передатчика управляемым способом. Это привело к первому практическому крупномасштабному пассивная матрица с электронным сканированием (PESA), или просто радар с фазированной антенной решеткой. PESA брали сигнал от одного источника, разбивали его на сотни трактов, выборочно задерживали некоторые из них и отправляли на отдельные антенны. Радиосигналы от отдельных антенн перекрывались в пространстве, и интерференционные картины между отдельными сигналами контролировались, чтобы усилить сигнал в определенных направлениях и заглушить его во всех других. Задержками можно легко управлять с помощью электроники, что позволяет очень быстро управлять лучом, не перемещая антенну. PESA может сканировать объем пространства намного быстрее, чем традиционная механическая система. Кроме того, благодаря прогрессу в электронике, PESA добавили возможность создавать несколько активных лучей, что позволяет им продолжать сканировать небо, в то же время фокусируя меньшие лучи на определенных целях для отслеживания или наведения. полуактивная радиолокационная система самонаведения ракеты. PESA быстро получили широкое распространение на кораблях и крупных стационарных объектах в 1960-х годах, за ними последовали воздушные датчики по мере того, как уменьшилась электроника.
AESA являются результатом дальнейшего развития твердотельной электроники. В более ранних системах передаваемый сигнал изначально создавался в клистроне или лампа бегущей волны или аналогичное устройство, которое относительно велико. Электроника приемника также была крупной из-за высоких частот, с которыми она работала. Вступление к арсенид галлия Микроэлектроника в 1980-х годах способствовала значительному уменьшению размеров приемных элементов до тех пор, пока эффективные элементы не могли быть построены с размерами, аналогичными размерам портативных радиоприемников, всего в несколько кубических сантиметров в объеме. Вступление к JFET-транзисторы и MESFET сделал то же самое и со стороны передатчика систем. Это дало начало усилителям-передатчикам с маломощным твердотельным генератором сигналов, питающим усилитель, что позволило любому радару, оборудованному таким образом, передавать в гораздо более широком диапазоне частот, вплоть до изменения рабочей частоты с каждым отправленным импульсом. Если сжать всю сборку (передатчик, приемник и антенну) в один «модуль передатчика-приемника» (TRM) размером с картонную коробку с молоком и расположить эти элементы, получается AESA.
Основным преимуществом AESA перед PESA является способность разных модулей работать на разных частотах. В отличие от PESA, где сигнал генерируется на отдельных частотах небольшим количеством передатчиков, в AESA каждый модуль генерирует и излучает свой собственный независимый сигнал. Это позволяет AESA генерировать множество одновременных "дополнительных лучей", которые он может распознавать из-за разных частот, и активно отслеживать гораздо большее количество целей. AESA также может создавать лучи, которые состоят из множества разных частот одновременно, используя постобработку объединенного сигнала от ряда TRM для воссоздания изображения, как если бы был отправлен один мощный луч. Однако это означает, что шум, присутствующий на каждой частоте, также принимается и складывается.
Преимущества
AESA добавляют множество собственных возможностей к возможностям PESA. Среди них: возможность формировать несколько лучей одновременно, использовать группы TRM для разных ролей одновременно, например, радарное обнаружение, и, что более важно, их одновременные множественные лучи и частоты сканирования создают трудности для традиционных радарных детекторов корреляционного типа.
Низкая вероятность перехвата
Радиолокационные системы работают, посылая сигнал, а затем прислушиваясь к его эхо от удаленных объектов. Каждый из этих путей к цели и от нее зависит от закон обратных квадратов распространения как в передаваемом, так и в отраженном обратно сигнале. Это означает, что энергия, принимаемая радаром, падает в четвертой степени от расстояния, поэтому радиолокационным системам требуется большая мощность, часто в мегаваттном диапазоне, чтобы быть эффективными на больших расстояниях.
Отправляемый радиолокационный сигнал представляет собой простой радиосигнал, и его можно получить с помощью простого радиоприемник. Военные самолеты и корабли имеют защитные приемники, называемые "приемники радиолокационной сигнализации "(RWR), которые обнаруживают, когда на них попадает луч вражеского радара, тем самым выявляя положение противника. В отличие от радарного устройства, которое должно посылать импульс, а затем получать его отражение, приемник цели не нуждается в отражении и таким образом, сигнал падает только как квадрат расстояния. Это означает, что приемник всегда имеет преимущество (пренебрегая несоответствием в размерах антенны) перед радаром с точки зрения дальности - он всегда сможет обнаружить сигнал задолго до радара. может видеть эхо цели.Поскольку положение радара является чрезвычайно полезной информацией при атаке на эту платформу, это означает, что радары, как правило, должны быть отключены на длительное время, если они подвергаются атаке; это часто встречается на кораблях, например .
В отличие от радара, который знает, в каком направлении он посылает сигнал, приемник просто получает импульс энергии и должен его интерпретировать. Поскольку радиоспектр наполнен шумом, сигнал приемника интегрируется за короткий период времени, в результате чего периодические источники, такие как радар, складываются и выделяются на случайном фоне. Грубое направление можно рассчитать с помощью вращающейся антенны или аналогичной пассивной решетки, используя фаза или же сравнение амплитуд. Обычно RWR сохраняют обнаруженные импульсы в течение короткого периода времени и сравнивают их частоту передачи и частота следования импульсов против базы данных известных радаров. Направление на источник обычно сочетается с символикой, указывающей вероятное назначение радара - воздушное раннее предупреждение и контроль, ракета земля-воздух, так далее.
Этот метод гораздо менее полезен против радара с быстродействующим (твердотельным) передатчиком. Поскольку AESA (или PESA) может изменять свою частоту с каждым импульсом (кроме случаев, когда используется доплеровская фильтрация) и обычно делает это с использованием случайной последовательности, интегрирование по времени не помогает выделить сигнал из фонового шума. Более того, радар может быть сконструирован для увеличения длительности импульса и снижения его пиковой мощности. AESA или современный PESA часто имеют возможность изменять эти параметры во время работы. Это не влияет на полную энергию, отраженную от цели, но снижает вероятность обнаружения импульса системой RWR.[9] AESA также не имеет фиксированной частоты повторения импульсов, которая также может быть изменена и, таким образом, скрывает любое периодическое повышение яркости по всему спектру. RWR старого поколения по существу бесполезны против радаров AESA, поэтому AESA также известны как «низкая вероятность перехвата РЛСс. Современные RWR должны быть высокочувствительными (малые углы и полоса пропускания для отдельных антенн, низкие потери передачи и шум).[9] и добавить последовательные импульсы с помощью частотно-временной обработки для достижения полезных скоростей обнаружения.[10]
Высокая стойкость к заклиниванию
Глушить также намного труднее против AESA. Традиционно глушители работают, определяя рабочую частоту радара и затем передавая на нем сигнал, чтобы сбить приемник с толку относительно того, какой из импульсов является «настоящим», а какой - глушителем. Этот метод работает до тех пор, пока радиолокационная система не может легко изменить свою рабочую частоту. Когда передатчики были основаны на клистронных трубках, это в целом было правдой, и радары, особенно бортовые, имели лишь несколько частот на выбор. Глушитель может прослушивать эти возможные частоты и выбирать ту, которая будет использоваться для глушения.
Большинство радаров, использующих современную электронику, способны изменять свою рабочую частоту с каждым импульсом. Это может сделать глушение менее эффективным; хотя можно посылать широкополосный белый шум для проведения заградительный удар против всех возможных частот это уменьшает количество энергии глушителя на любой одной частоте. AESA имеет дополнительную возможность расширения своих частот по широкой полосе частот даже в одном импульсе, метод, известный как «щебетание». В этом случае помехи будут той же частоты, что и у радара, только на короткий период, в то время как остальная часть радиолокационного импульса не будет заглушена.
AESA также можно переключить в режим только приема и использовать эти мощные сигналы глушения для отслеживания его источника, что требовало отдельного приемника на старых платформах. Интегрируя полученные сигналы от собственного радара цели вместе с более низкой скоростью передачи данных из собственных радиопередач, система обнаружения с точным RWR, такая как AESA, может генерировать больше данных с меньшим энергопотреблением. Некоторые приемные системы с возможностью формирования луча, обычно наземные, могут даже полностью отказаться от передатчика.
Однако использование одной приемной антенны дает только направление. Для получения диапазона и вектора цели требуются как минимум два физически отдельных пассивных устройства для триангуляция для обеспечения мгновенных определений, если только фаза интерферометрия используется. Анализ движения цели может оценить эти величины путем включения множества направленных измерений с течением времени, наряду со знанием положения приемника и ограничений на возможное движение цели.
Прочие преимущества
Поскольку каждый элемент в AESA представляет собой мощный радиоприемник, активные массивы выполняют множество функций помимо традиционных радаров. Одно из применений - выделить несколько элементов для приема обычных радиолокационных сигналов, исключив необходимость в отдельном приемнике радиолокационных предупреждений. Та же основная концепция может быть использована для обеспечения традиционной поддержки радио, а с некоторыми элементами, также транслирующими, формируют очень высокий пропускная способность канал передачи данных. F-35 использует этот механизм для передачи данных датчиков между самолетами, чтобы обеспечить синтетическое изображение с более высоким разрешением и дальностью, чем может генерировать любой радар. В 2007 г. тесты Northrop Grumman, Lockheed Martin и L-3 Связь позволил системе AESA Raptor действовать как Вай фай точка доступа, способная передавать данные со скоростью 548 мегабит в секунду и принимать со скоростью гигабит; это намного быстрее, чем Ссылка 16 система, используемая самолетами США и их союзников, которая передает данные со скоростью чуть более 1 Мбит / с.[11] Для достижения этих высоких скоростей передачи данных требуется высоконаправленная антенна, которую обеспечивает AESA, но которая препятствует приему другими устройствами, не находящимися в пределах ширины луча антенны, тогда как, как и большинство конструкций Wi-Fi, Link-16 передает свой сигнал всенаправленно, чтобы гарантировать, что все устройства в пределах диапазона может получать данные.
AESA также намного надежнее, чем PESA или более старые конструкции. Поскольку каждый модуль работает независимо от других, единичные сбои мало влияют на работу системы в целом. Кроме того, модули по отдельности работают на малых мощностях, от 40 до 60 Вт, поэтому отпадает необходимость в большом высоковольтном источнике питания.
Замена механически отсканированного массива фиксированным креплением AESA (например, на Боинг F / A-18E / F Super Hornet ) может помочь снизить общую поперечное сечение радара (RCS), но некоторые конструкции (например, Еврофайтер Тайфун ) отказаться от этого преимущества, чтобы объединить механическое сканирование с электронным сканированием и обеспечить более широкий угол общего охвата.[12] Такое высокое наведение позволяет истребителю с системой AESA использовать Пересекая T маневр, часто называемый `` лучом '' в контексте боя воздух-воздух, против радара с механическим сканированием, который отфильтровал бы низкую скорость приближения перпендикулярного полета как помехи от земли, в то время как AESA поворачивается на 40 градусов к цели в чтобы удерживать его в пределах 60 градусов угла отклонения AESA.[13]
Ограничения
При расстоянии в половину длины волны между элементами максимальный угол луча составляет приблизительно °. При меньшем расстоянии между элементами максимальное поле обзора (FOV) для плоской фазированной антенной решетки в настоящее время составляет 120 ° (°),[14] хотя это можно сочетать с механическим рулевым управлением, как указано выше.[15][16]


Список существующих систем
Бортовые системы
- Northrop Grumman
- Ан / АПГ-77, для F-22 Raptor
- Ан / АПГ-80, для F-16E / F Сокол пустыни
- Ан / АПГ-81, для F-35 Молния II
- Ан / АПГ-83 САБР, для F-16V Viper и B-1B Lancer обновления
- AN / APY-9, для E-2D Продвинутый Соколиный глаз
- Многоцелевой массив с электронным сканированием (Радар MESA), для Боинг E-7 Wedgetail (AEW и C) самолет
- AN / ASQ-236 Поддонный радар AESA
- AN / ZPY-1 Малый тактический радар STARLite - легкий, для пилотируемых и беспилотных самолетов
- AN / ZPY-2 Программа внедрения многоплатформенных радарных технологий (MP-RTIP)
- AN / ZPY-3 Многофункциональный активный датчик (MFAS) для MQ-4C Тритон
- Радар для демонтажа и эксплуатации транспортного средства (VADER)
- Raytheon
- Ан / АПГ-63 (В) 2 и AN / APG-63 (V) 3, для F-15C Eagle, Республика Сингапур с F-15SG
- Ан / АПГ-79, для F / A-18E / F Супер Хорнет и EA-18G Growler
- Ан / АПГ-82 (В) 1 для F-15E Strike Eagle
- AN / APQ-181 перейти с PESA на AESA, для Northrop Grumman B-2 Spirit бомбардировщик
- RACR (Улучшенный боевой радар Raytheon)
- ААС Усовершенствованный воздушный датчик (AESA продолжение Радиолокационная система наблюдения за прибрежной зоной (LSRS, APS-149 также построен Raytheon), для Боинг P-8 Посейдон
- Raytheon Sentinel АСТОР (бортовой радар стояночного режима)

- Captor-E CAESAR (CAPTOR активный радар с электронным сканированием) для Еврофайтер Тайфун
- Selex ES (сейчас же Леонардо )
- Mitsubishi Electric Corporation
- J / APG-1 / J / APG-2 AESA для Митсубиси Ф-2 истребитель
- ГЭС-104 для Mitsubishi SH-60
- Многофункциональный радиочастотный датчик за Mitsubishi ATD-X
- Фалес
- Toshiba
- РЛС воздушного и надводного поиска HPS-106 для Кавасаки Р-1 морской патрульный самолет, четыре антенных решетки.
- Ericsson
- Saab
- Фазотрон НИИР
- Тихомиров НИИП
- Эльта
- EL / M-2083 аэростат -монтированный радар воздушного поиска
- EL / M-2052, для бойцов. Временный кандидат в HAL Tejas. Также подходит для F-15, МиГ-29 & Мираж 2000
- EL / M-2075 радар для IAI Phalcon AEW & C система
- EL / W-2085 усовершенствованная версия РЛС для ЭЛ / М-2075, применяемая на Gulfstream G550
- EL / W-2090 аналогичен EL / W-2085, используется только на Ильюшин Ил-76

- NRIET (Нанкинский научно-исследовательский институт электронных технологий / 14 институтов), 607 институтов и 38 институтов
- Организация оборонных исследований и разработок
- DRDO LSTAR - Радар для бортовой платформы раннего предупреждения.
- Уттам AESA многофункциональный радар для HAL Tejas
- Радиотехническая корпорация Вега - радар для Вега Премьер
Наземные системы (наземные, морские)
Первым радаром AESA, использованным на боевом корабле, был японский ОПС-24 изготовлены по Mitsubishi Electric представлен на JDS Hamagiri (DD-155), первом корабле последней партии Эсминец типа Асагири, выпущенный в 1988 году.
- APAR (активный радар с фазированной антенной решеткой): Многофункциональный радар Thales Netherlands является основным датчиком Королевского военно-морского флота Нидерландов. De Zeven Provinciën класс фрегаты ВМС Германии Класс Sachsen фрегаты, и Королевский флот Дании Ивар Хуитфельдт класс фрегаты. APAR является первым многофункциональным радаром с активной решеткой с электронным сканированием, который используется на боевом корабле.[29]
- BÜR - Bodenüberwachungsradar к Кассидиан, для Бундесвер
- Китай
- Дорожный мобиль "Anti-Stealth" JY-26 "Skywatch-U" 3-D РЛС дальнего наблюдения за воздухом.[30]
- H / LJG-346 (8) на Китайский авианосец Ляонин
- H / LJG-346 на Эсминец Тип 052С
- H / LJG-346A на Эсминец Тип 052Д
- H / LJG-346B на Эсминец типа 055
- Радар Тип 305А (РЛС обнаружения для Ракета HQ-9 система)[31]
- YLC-2 Радар[32]

- Эльта
- EL / M-2080 Зеленая сосна наземный предварительное оповещение Радар AESA
- EL / M-2106 РЛС управления огнем ПВО ATAR
- EL / M-2180 - Многорежимный радар для наблюдения за землей WatchR Guard
- EL / M-2248 MF-STAR многофункциональный военно-морской радар
- EL / M-2258 Усовершенствованная легкая фазированная решетка АЛЬФА многофункциональный военно-морской радар
- EL / M-2084 РЛС многоцелевого действия (определение местоположения артиллерийских орудий, ПВО и управление огнем)
- EL / M-2133 WindGuard - Трофей РЛС системы активной защиты

- Локхид Мартин
- AN / TPQ-53 Радар обнаружения цели противодействия
- AN / SPY-7 Радар с большой дальностью обнаружения
- Northrop Grumman
- АН / ТПС-80 РЛС наземного и воздушного управления (G / ATOR )
- HAMMR Универсальный радар с высокой степенью адаптации
- Raytheon
- FlexDAR Радар с гибкой распределенной решеткой
- Национальная противоракетная оборона США Радар X-диапазона морского базирования (XBR)
- АН / ТПИ-2 Радар противоракетной обороны, который может быть автономным или быть частью ТААД Система ПРО
- AN / SPY-3 многофункциональный радар для США DD (X) и CVN-21 надводные суда нового поколения
- Радиолокатор противовоздушной и противоракетной обороны (AMDR) AN / SPY-6 многофункциональный радар для США Эсминцы Арли Берк, Авианосец класса Джеральд Р. Форд
- Cobra Judy Replacement (CJR) / Cobra King на USNS Howard O. Lorenzen (T-AGM-25)
- AN / FPS-132 Модернизированный радар раннего предупреждения (UEWR) - Проложить лапы перейти с PESA на AESA
- 3DELRR Трехмерный экспедиционный радар дальнего действия
- KuRFS[34]
- Selex ES
- KRONOS Land[36] И военно-морской[37] Многофункциональный радар 3D
- РАН-40Л 3D EWR
- КРЫСА-31ДЛ
- РАТ-31ДЛ / М
- Mitsubishi Electric Corporation
- Тип 3 Chū-SAM Многофункциональная РЛС ЗРК средней дальности (Чу-САМ, САМ-4)
- ОПС-24 (Первый в мире военно-морской радар с активным электронным сканированием) на Эсминцы типа Асагири, Эсминец типа Мурасамэ (1994) и Эсминцы типа Таканами
- ОПС-50 (FCS-3 ) на Вертолетный эсминец класса Хьюга, Вертолетный эсминец типа Изумо и Эсминец типа Акизуки (2010)
- J / FPS-3 Японская основная наземная ПВО
- J / FPS-5 Японская наземная РЛС противоракетной обороны нового поколения
- JTPS-P14 Переносная РЛС ПВО
- Пожарный радар JTPS-P16
- Toshiba
- J / FPS-4 Дешевле, чем J / FPS-3, произведенный Toshiba
- JMPQ-P13 Противобатарейный радар, Toshiba
- МУСЫ радар управления огнем

- BAE Systems
- САМПСОН многофункциональный радар для Великобритании Эсминцы Тип 45
- АРТИЗАН Многофункциональная РЛС Тип 997 для Великобритании Тип 23 и Тип 26 Фрегаты и Класс королевы Елизаветы авианосцы
- J / TPS-102 Самоходная наземная РЛС, цилиндрическая антенная решетка, NEC
- CEA Technologies
- CEAFAR многофункциональная цифровая РЛС с активной фазированной антенной решеткой 4-го поколения S-диапазона, установленная на всех фрегатах класса РАН АНЗАК.
- ННИИРТ Мобильная РЛС 3-мерного наблюдения 1Л119 Небо СВУ с АФАР
- ВНИИРТ Гамма ДЭ мобильная трехмерная твердотельная РЛС наблюдения с АФАР
- 50Н6А Многофункциональная РЛС Ракетный комплекс Витязь и 42С6 "Морфей "(" Морфеус ")
- Национальный институт науки и технологий Чжун-Шаня
- CS / MPQ-90 Пчелиный глаз - многофункциональная РЛС
- КС / СПГ-6 - морская РЛС с надводными вариантами поиска и управления огнем
- Организация оборонных исследований и разработок
- Ashwini LLTR Radar - 4D радар AESA (используется ВВС Индии).
- Радар Arudhra - Многофункциональный радар AESA (используется ВВС Индии).[39]
- Радиолокатор дальнего действия Swordfish - РЛС обнаружения цели и управления огнем для системы противоракетной обороны.
- Радиолокатор тактического управления ПВО (ADTCR) - РЛС тактического управления.
- РЛС управления огнем ПВО "Атуля" (ADFCR) - X-диапазон, 3D радар управления огнем.
- Bharat Electronics Limited
- L&T
- Радиолокационная система управления огнем ПВО - радар наблюдения 3D
- LIG Nex1
- СПС-550К РЛС среднего радиуса действия воздушного и надводного Фрегаты типа "Инчхон" и Фрегаты типа Тэгу
Смотрите также
- Конфигурации и типы радаров
- Приемник
- Пассивная матрица с электронным сканированием
- Низкая вероятность перехвата радара
- Радар слежения за ландшафтом
- Радар с твердотельной фазированной решеткой
Рекомендации
Эта статья нужны дополнительные цитаты для проверка. (Апрель 2015 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
- ^ Bell Labs 1975 г., п. И-35.
- ^ а б Bell Labs 1975 г., п. 2-3.
- ^ Томохико Тада (март 2010 г.). «4. Радиолокационная станция / ECM / ESM (Корабельное вооружение JMSDF 1952-2010)». Корабли Мира (на японском языке). Кайдзин-ша (721): 100–105.
- ^ а б «Япония модернизирует 60 F-2 с помощью AAM-4, J / APG-2». Получено 17 июн 2015.
- ^ «Northrop Grumman успешно прошел сертификацию летных испытаний радара F-22 (NYSE: NOC)». Получено 17 июн 2015.
- ^ Корпоративные коммуникации Raytheon. "Raytheon". Архивировано из оригинал на 2008-07-07. Получено 17 июн 2015.
- ^ Взгляд DARPA на будущее электроники В архиве 2007-09-26 на Wayback Machine
- ^ «Архивная копия» (PDF). Архивировано из оригинал (PDF) на 2007-09-26. Получено 2007-08-18.CS1 maint: заархивированная копия как заголовок (связь)
- ^ а б "IEEE TEMS Home - IEEE Technology and Engineering Management Society" (PDF). Общество управления технологиями и инженерией IEEE.
- ^ "404 Не Найдено" (PDF). Архивировано из оригинал (PDF) 30 июня 2015 г.. Получено 17 июн 2015.
- ^ Пейдж, Льюис. «Суперджеты F-22 могут действовать как летающие точки доступа Wi-Fi». Реестр, 19 июня 2007 г. Дата обращения: 7 ноября 2009 г.
- ^ «НАВАИР - Командование авиационных систем ВМС США - Авиационные исследования, разработка, приобретение, испытания и оценка ВМС и корпуса морской пехоты».[постоянная мертвая ссылка ]
- ^ Роговей, Тайлер (21 ноября 2015 г.). «У истребителя SAAB Gripen NG есть отличный способ сделать свой радар более функциональным». jalopnik.com. Кинджа. Получено 12 апреля 2016.
- ^ «Введение в моделирование электронной войны». Artech House - через Google Книги.
- ^ Адами, Дэвид (26 марта 2018 г.). «Введение в моделирование электронной войны». Artech House - через Google Книги.
- ^ «Ошибка 308». Архивировано из оригинал 6 мая 2015 г.. Получено 17 июн 2015.
- ^ «ПИКОСАР - ДЕТАЛИ - Леонардо». Получено 27 июля 2016.
- ^ "ВОРОН ЕС-05". Leonardocompany.com. Получено 27 июля 2016.
- ^ «Архивная копия». Архивировано из оригинал на 2013-12-19. Получено 2013-12-19.CS1 maint: заархивированная копия как заголовок (связь)
- ^ «SeaSpray 5000E - ДЕТАЛИ - Леонардо». Получено 27 июля 2016.
- ^ «SeaSpray 7000E - ДЕТАЛИ - Леонардо». Получено 27 июля 2016.
- ^ «SeaSpray 7500E - ДЕТАЛИ - Леонардо». Получено 27 июля 2016.
- ^ "VIXEN 500E - ДЕТАЛИ - Леонардо". Получено 27 июля 2016.
- ^ "VIXEN 1000E - ДЕТАЛЬ - Леонардо". Получено 27 июля 2016.
- ^ «Saab запускает многоцелевую бортовую систему наблюдения GlobalEye». Технологии ВВС. 17 февраля 2016 г.
- ^ а б http://www.ausairpower.net/APA-PLA-AWACS-Programs.html Программы раннего предупреждения и контроля с воздуха PLA-AF
- ^ «Архивная копия». Архивировано из оригинал на 2011-12-05. Получено 2011-12-10.CS1 maint: заархивированная копия как заголовок (связь) Китайская военная авиация - Истребители (продолжение)
- ^ https://nationalinterest.org/blog/the-buzz/chinas-new-j-16d-aircraft-might-have-terrifying-new-m military-23427
- ^ Jane's Navy International, август 2010, "Расширение охвата от моря до неба"
- ^ МИННИК, ВЕНДЕЛЛ (22 ноября 2014 г.). "Китайский радар против незаметности приносит свои плоды". www.defensenews.com. Ганнетт. Архивировано из оригинал 24 ноября 2014 г.. Получено 25 ноября 2014.
- ^ http://www.ausairpower.net/APA-HQ-9-12-Battery-Radars.html Батарейные РЛС ЗРК HQ-9 и HQ-12
- ^ Джон Си Уайз. "Радары ПВО НОАК". Получено 17 июн 2015.
- ^ http://www.rada.com/capabilities-3/land-radars-2.html Тактические наземные радары RADA
- ^ https://www.raytheon.com/news/feature/kurfs-radar
- ^ http://www.janes.com/article/38219/saab-expands-surface-radar-portfolio Saab расширяет портфолио наземных радаров
- ^ «КРОНОС ЛЭНД - ДЕТАЛИ - Selex ES». Архивировано из оригинал 18 марта 2015 г.. Получено 17 июн 2015.
- ^ "КРОНОС НАВАЛ - ДЕТАЛИ - Selex ES". Архивировано из оригинал 17 марта 2015 г.. Получено 17 июн 2015.
- ^ https://www.thalesgroup.com/en/smart-l-mm
- ^ "Список радаров DRDO". drdo.gov.in. Архивировано из оригинал 23 июля 2014 г.. Получено 25 июля 2016.
- ^ а б «Архивная копия». Архивировано из оригинал на 2016-11-03. Получено 2016-11-01.CS1 maint: заархивированная копия как заголовок (связь)
Библиография
- Bell Labs (октябрь 1975 г.). Исследования и разработки ABM в Bell Laboratories, История проекта (PDF) (Технический отчет). Получено 13 декабря 2014.
внешняя ссылка
- Активные решетки с электронным управлением - технология созревания (ausairpower.net)
- FLUG REVUE Декабрь 1998 г .: Современные радарные технологии истребителей. (flug-revue.rotor.com)
- Фазированные решетки и радары - прошлое, настоящее и будущее (mwjournal.com)