Система рыскания - Yaw system

В система рыскания из Ветряные турбины компонент, отвечающий за ориентацию ветряной турбины ротор по направлению к ветер.
История
Задача ориентации ротора по ветру была сложной задачей уже для исторической ветряные мельницы. Первый ветряные мельницы может вращаться, чтобы «смотреть в лицо» ветер появился в середине 18 века.[1] Их поворотные гондолы были установлены на основной конструкции мельница с использованием примитивных деревянных подшипники скольжения смазанный животный жир. Необходимый момент рыскания создавался с помощью животная сила, человеческая сила или даже сила ветра (реализация вспомогательного ротора, известного как веерный хвост).
Ветряные турбины с вертикальной осью (VAWT ) не нуждаются в системе рыскания, поскольку их вертикальные роторы могут смотреть на ветер с любого направления, и только их самовращение дает лопастям четкое направление воздушного потока.[1] Горизонтально-осевые ветряные турбины однако необходимо сориентировать их роторы в и из ветер и они достигают этого с помощью пассивных или активных систем рыскания.
Горизонтально-осевые ветряные турбины использовать какую-то систему рыскания, которая может быть пассивной или активной. И пассивные, и активные системы имеют свои преимущества и недостатки, и в настоящее время испытываются различные конструктивные решения (как активные, так и пассивные), чтобы найти оптимальную конструкцию для каждой ветряной турбины в зависимости от ее размера, стоимости и цели эксплуатации.
Типы

Системы активного рыскания
Системы активного рыскания оснащены своего рода устройством, создающим крутящий момент, способным вращать гондолу ветряной турбины относительно неподвижной башни на основе автоматических сигналов от датчиков направления ветра или ручного включения (блокировка системы управления). Системы активного рыскания считаются самыми современными для всех современных средних и больших ветряных турбин, за некоторыми исключениями, подтверждающими правило (например, Vergnet ). Различные компоненты современных систем активного рыскания различаются в зависимости от конструктивных характеристик, но все системы активного рыскания включают в себя средства поворотного соединения между гондолой и башней (подшипник рыскания ), средство активного изменения ориентации ротора (т.е. рыскание ), средство ограничения вращения гондолы (тормоз рыскания) и система управления, которая обрабатывает сигналы от датчиков направления ветра (например, флюгеры ) и подает соответствующие команды исполнительным механизмам.
Наиболее распространенные типы активных систем рыскания:
- Роликовый подшипник рыскания - Электрический рыскание - Тормоз: гондола установлена на роликовый подшипник и азимут вращение достигается за счет множества мощных электрические приводы. Гидравлический или электрический тормозить фиксирует положение гондола когда переориентация завершена, чтобы избежать носить и высокий усталостные нагрузки на компонентах ветровой турбины из-за люфт. Системы такого типа используются большинством производителей ветряных турбин и считаются надежными и эффективными, но при этом довольно громоздкими и дорогими.
- Роликовый подшипник рыскания - Гидравлический рыскание: Гондола установлена на роликовый подшипник а азимутальное вращение достигается за счет множества мощных гидромоторы или трещотка гидроцилиндры. Преимущество системы рыскания с гидравлические приводы связано с неотъемлемыми преимуществами гидравлических систем, такими как высокая удельная мощность и высокий надежность. С другой стороны, гидравлические системы всегда страдают утечками гидравлическая жидкость и засорение их высоким давлением гидравлические клапаны. Гидравлические системы рыскания часто (в зависимости от конструкции системы) также позволяют исключить тормозной механизм рыскания и заменить их на отсечные клапаны.
- Скользящий подшипник рыскания - Электрический рыскание: Гондола установлена на фрикционной основе. скользящий подшипник а азимутальное вращение достигается за счет множества мощных электрические приводы. Отсутствует необходимость в тормозе рыскания, и в зависимости от размера системы рыскания (т.е. ветряная турбина ) скользящий подшипник концепция может привести к значительной экономии средств.
- Скользящий подшипник рыскания - Гидравлический рыскание: Гондола установлена на фрикционной основе. скользящий подшипник а азимутальное вращение достигается за счет множества мощных гидромоторы или трещотка гидроцилиндры. Эта система сочетает в себе характеристики вышеупомянутых скользящий подшипник и гидравлический мотор системы.
Пассивные системы рыскания
Пассивные системы рыскания используют силу ветра для регулировки ориентации ветряная турбина ротор по ветру. В своей простейшей форме эта система представляет собой простой роликовый подшипник соединение башни с гондолой и хвостовым стабилизатором, установленным на гондоле и сконструированным таким образом, чтобы ветряная турбина ротор против ветра, создавая «корректирующий» крутящий момент на гондолу. Следовательно, сила ветра отвечает за вращение ротора и ориентацию гондолы. В качестве альтернативы в случае подветренный турбины в хвостовом оперении нет необходимости, так как ротор сам рыскание гондола против ветра. В случае косого ветра «ветровое давление» на протянутое пространство вызывает рыскание. момент вокруг оси башни (оси Z), которая ориентирует ротор.[1]
Хвостовой стабилизатор (или флюгер) обычно используется для небольших ветряных турбин, поскольку он предлагает низкую стоимость и надежность. Однако он не может справиться с высокими моментами, необходимыми для рыскания гондолы большой ветряной турбины. Самоориентация подветренный роторы турбин, однако, могут работать даже с более крупными ветряными турбинами. Французский производитель ветряных турбин Vergnet имеет несколько средних и крупных самоориентирующихся подветренный Ветряные турбины в производстве.
Системы пассивного рыскания должны быть спроектированы таким образом, чтобы гондола не отслеживала резкие изменения направление ветра со слишком быстрым рысканием во избежание высокого гироскопический нагрузки. Кроме того, пассивные системы рыскания с низким рысканиемтрение подвергаются сильным динамическим нагрузкам из-за периодической низкой амплитуда рыскание, вызванное изменением момент инерции при вращении ротора. Этот эффект становится более серьезным при уменьшении количества лопастей.
Наиболее распространенные системы пассивного рыскания:
- Роликовый подшипник (бесплатная система): гондола установлен на роликовый подшипник и он может свободно вращаться в любом направлении. Необходимость момент исходит из хвостового оперения или ротора (подветренный Ветряные турбины )
- Роликовый подшипник - тормоз (полуактивная система): гондола установлен на роликовый подшипник и он может свободно вращаться в любом направлении, но когда необходимая ориентация достигнута, активный тормоз рыскания останавливает гондола. Это предотвращает неконтролируемое вибрация и уменьшил гироскопический и усталостные нагрузки.
- Подшипник скольжения / тормоз (пассивная система): гондола установлен на скользящий подшипник и он может свободно вращаться в любом направлении. Присущая трение из скользящий подшипник достигает квазиактивного режима работы.
Компоненты

Подшипник рыскания
Одним из основных компонентов системы рыскания является подшипник рыскания. Он может быть роликового или скользящего типа и служит поворотным соединением между башней и башней. гондола из ветряная турбина. В подшипник рыскания должен выдерживать очень большие нагрузки, помимо веса гондола и ротор (вес которого находится в пределах нескольких десятых тонны ) включают также изгибающие моменты вызванный ротором во время извлечения кинетическая энергия ветра.
Рыскание
В рыскание движется существуют только на активных системах рыскания и являются средством активного вращения ветряная турбина гондола. Каждый рыскание состоит из мощных электрический двигатель (обычно AC ) со своим электроприводом и большим коробка передач, что увеличивает крутящий момент. Максимальный статический крутящий момент из самых больших рыскание движется находится в диапазоне 200000 Нм с коробкой передач передаточные числа в диапазоне 2000: 1.[2] Следовательно, рыскание большого современные турбины относительно медленный с поворотом на 360 ° за несколько минут.
Рыскание тормоз
Чтобы стабилизировать подшипник рыскания против вращения необходимо средство торможения. Один из простейших способов реализовать эту задачу - приложить постоянный небольшой противодействующий крутящий момент на рыскание движется чтобы устранить люфт между зубчатый венец и рыскание шестерни и предотвратить гондола от колеблющийся за счет вращения ротора. Однако эта операция значительно снижает надежность электрического рыскание движется, поэтому наиболее распространенным решением является реализация гидравлического привода дисковый тормоз.
В дисковый тормоз требуется плоский круговой тормозной диск и множество тормозов суппорты с гидравлическим поршни и тормозные колодки [1]. Гидравлические тормоза рыскания могут исправить гондола в позиции, тем самым облегчая рыскание движется из этой задачи. Однако стоимость тормоза рыскания в сочетании с необходимостью гидравлической установки (насос, клапаны, поршни ) и его установка вблизи тормозных колодок, чувствительных к смазка загрязнение это часто проблема.
Компромисс, который дает несколько преимуществ, - это использование электрических тормозов рыскания. Они заменяют гидравлический механизм обычных тормозов и тормозные суппорты с электромеханическим приводом. Использование электрических тормозов рыскания устраняет сложность гидравлических утечек и последующие проблемы, которые они вызывают при работе тормоза рыскания.[3]
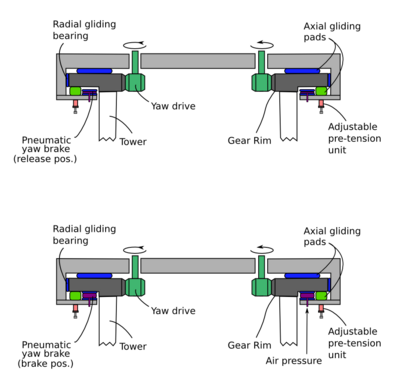
Несколько компаний, занимающихся проектированием и производством ветряных турбин, экспериментируют с альтернативными методами устранения рыскания, чтобы устранить недостатки существующих систем и снизить стоимость системы. Одна из этих альтернатив включает использование давления воздуха для достижения необходимого момента торможения при рыскании. В этом случае часть поверхности скольжения (обычно осевой из-за большей доступной поверхности) используется для размещения тормозных колодок рыскания и пневматического тормозного механизма. Пневматический привод может быть обычным пневматическим цилиндром или даже гибкой воздушной камерой, которая надувается при подаче сжатого воздуха. Такое устройство способно оказывать очень высокие тормозные усилия из-за большой активной поверхности. Это достигается с помощью простой промышленной системы сжатия воздуха под давлением (6–10 бар, 600–1000 кПа или 87–145 фунтов на кв. Дюйм), которая является надежным и недорогим решением. Кроме того, даже при утечке воздействие на окружающую среду практически равно нулю по сравнению с утечкой гидравлического масла. Наконец, тормозные приводы могут изготавливаться с очень низкой стоимостью из легких пластиковых материалов, что значительно снижает общую стоимость системы.
Флюгер рыскания (пассивные системы)
Лопасть рыскания (или хвостовой стабилизатор) является компонентом системы рыскания, используемой только на небольших ветряных турбинах с пассивными механизмами рыскания. Это не что иное, как плоская поверхность, установленная на гондола с помощью длинного луч. Сочетание большого площадь поверхности плавника и увеличенного длина балки создают значительную крутящий момент который способен вращать гондола несмотря на стабилизацию гироскопический эффекты ротора. Требуемый площадь поверхности однако, чтобы хвостовой плавник мог рыскание большой ветряная турбина огромен, что делает использование такого устройства неэкономичным.
Смотрите также
использованная литература
- ^ а б c Ветряные электростанции, Р. Гаш и Дж. Твеле, Solarpraxis, ISBN 3-934595-23-5
- ^ Решения Bonfiglioli по питанию и управлению
- ^ Hanning & Kahl GmbH Азимутбремсен
дальнейшее чтение
- Ветряные электростанции, Р. Гаш и Дж. Твеле, Solarpraxis, ISBN 3-934595-23-5
- Справочник по ветроэнергетике, Т. Бертон [и др.], John Wiley & Sons, Ltd, ISBN 0-471-48997-2
- Как построить ветряную турбину - планы ветряной мельницы с осевым потоком, Х. Пигготт Scoraigwind