Уорд Леонард контроль - Ward Leonard control
Уорд Леонард контроль, также известная как система привода Уорда Леонарда, широко использовалась Двигатель постоянного тока система контроля скорости введена Гарри Уорд Леонард в 1891 году. В начале 1900-х годов система управления Уорда Леонарда была принята на вооружение ВМС США, а также использовалась в пассажирских подъемниках крупных шахт. Он также предоставил решение движущийся тротуар на Парижской выставке 1900 года, где многие другие не работали должным образом.[нужна цитата ] Применялся к железнодорожным локомотивам, используемым в Первая Мировая Война, и использовался в зенитных радарах в Вторая Мировая Война. Подключен к автоматической зенитной установке директора, отслеживающее движение в двух измерениях должно было быть чрезвычайно плавным и точным. В Радиационная лаборатория Массачусетского технологического института выбрал Уорд-Леонарда для оснащения знаменитого радара SCR-584 в 1942 году. Система управления Ward Leonard широко использовалась для лифты до того как тиристор приводы стали доступны в 1980-х годах, поскольку они обеспечивали плавное регулирование скорости и постоянный крутящий момент. Многие системы управления Ward Leonard и их разновидности продолжают использоваться.[1]
Основная концепция
Ключевой особенностью системы управления Ward Leonard является способность плавно изменять скорость двигателя постоянного тока, включая его реверсирование, путем управления поле и, следовательно, выходное напряжение генератора постоянного тока, а также поле самого двигателя. Поскольку скорость двигателя постоянного тока определяется подаваемым напряжением, это обеспечивает простое управление скоростью. Генератор постоянного тока можно было приводить в действие любым способом. Этим «первичным двигателем» может быть электродвигатель переменного тока или двигатель внутреннего сгорания (его применение в транспортных средствах было запатентовано Г. В. Леонардом в 1903 году.[2]).
Привод Ward Leonard можно рассматривать как усилитель высокой мощности в многокиловаттном диапазоне, созданный из вращающихся электрических машин. Если «первичный двигатель» является электрическим, то привод Ward Leonard состоит из двигателя и генератора с соединенными вместе валами. Первичный двигатель, который вращается с постоянной скоростью, может питаться от переменного или постоянного тока. Генератор представляет собой генератор постоянного тока с обмотки возбуждения и обмотки якоря. Вход усилителя подается на обмотки возбуждения, а большая выходная мощность поступает от обмоток якоря. (Видеть Возбуждение (магнитное) # Принцип усилителя о том, как генератор может действовать как усилитель.) Выход усилителя обычно подключается ко второму двигателю, который перемещает нагрузку, например, к лифту. При таком расположении небольшие изменения тока, подаваемого на вход, и, следовательно, поля генератора, приводят к большим изменениям на выходе, обеспечивая плавное регулирование скорости.[3]
А маховик может использоваться для уменьшения колебаний напряжения при резких изменениях нагрузки. Система Уорда Леонарда с этой модификацией известна как Уорд Леонард Илгнер Контроль.[4]
Более подробное техническое описание
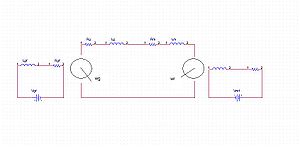
Скорость двигателя постоянного тока регулируется путем изменения напряжения, подаваемого на обмотки возбуждения генератора, Вgf, который изменяет выходное напряжение генератора. Изменяющееся выходное напряжение изменит напряжение двигателя, поскольку они подключаются напрямую через якорь. Следовательно, изменение Vgf будет контролировать скорость двигателя. На рисунке справа изображена система управления Ward Leonard с буквой Vgf питание генератора и Vмф питание мотора.[5]
Функция передачи
Первые индексы «g» и «m» обозначают генератор и двигатель. Верхние индексы «f», «r» и «a» соответствуют полю, ротору и якорю.
- = вектор состояния объекта
- = усиление
- = постоянная времени
- = полярный момент инерции
- = угловое вязкое трение
- = постоянная индуктивности вращения
- = Оператор Лапласа







Уравнение 1: Уравнение поля генератора

Уравнение 2: Уравнение электрического равновесия в цепи якоря

Уравнение 3: Уравнение крутящего момента двигателя

С полным сопротивлением, , пренебрегая, передаточная функция может быть получена путем решения уравнения 3 .


Уравнение 4: Передаточная функция

с константами, определенными как ниже:





Смотрите также
- Привод с регулируемой скоростью
- Амплидин, электромеханический усилитель, изобретенный во время Второй мировой войны.
- Матовый электродвигатель постоянного тока
- Электрический двигатель
- Электронная регулировка скорости
- Гарри Уорд Леонард
- Метадин
- Контроллер мотора
- Мотор-генератор
Рекомендации
- Цитаты
- ^ Кулкарни, А. (Октябрь 2000 г.). «Анализ энергопотребления для модернизации редукторного лифта: модернизация системы постоянного тока Уорда Леонарда на привод переменного тока с векторным управлением». Отчет о конференции по промышленным приложениям IEEE 2000 г.. 4. Институт инженеров по электротехнике и радиоэлектронике. С. 2066–2070.
- ^ «Электромобиль», H.W. Леонард, патент США 1121382, первоначально поданный в марте 1903 г.
- ^ Шиннерс, Стэнли М (1998). Теория современных систем управления. Wiley and Sons. п. 202. ISBN 978-0471249061.
- ^ Раджпут, Р. (2005). Базовая электротехника. Laxmi Publications Pvt Limited. п. 571. ISBN 9788170081203. Получено 2014-06-14.CS1 maint: ref = harv (связь)
- ^ а б Датта, А. (1973). «Безкомпьютерное оптимальное управление приводной системой Уорда Леонарда». Международный журнал системной науки. 4 (4): 671–678. Дои:10.1080/00207727308920047.
- Общие ссылки
- Редакторы (ноябрь 1989 г.). «Технология электрических компонентов». Конструкция передачи мощности: 25–27.
- Уорд Леонард, Х. (1896 г.). «Вольт против Ом - регулирование скорости электродвигателей». AIEE Trans. 13: 375–384.
- Готтлиб, И.М. (1994). "Электродвигатели и методы управления, 2-е издание". Вкладка Книги. Цитировать журнал требует
| журнал =(помощь) - Малкольм Барнс (2003). Практичные преобразователи частоты и силовая электроника. Оксфорд: Newnes. С. 20–21. ISBN 978-0-7506-5808-9.