Шаговый ответ - Step response
В пошаговая реакция системы в данном начальном состоянии состоит из эволюции ее выходов во времени, когда ее управляющие входы Ступенчатые функции Хевисайда. В электроинженерия и теория управления, переходная характеристика - это временное поведение выходных сигналов общего система когда его входы меняются с нуля на единицу за очень короткое время. Эту концепцию можно расширить до абстрактного математического понятия динамическая система используя параметр эволюции.
С практической точки зрения важно знать, как система реагирует на внезапный входной сигнал, поскольку большие и, возможно, быстрые отклонения от долгосрочного устойчивого состояния могут иметь экстремальные последствия для самого компонента и других частей системы в целом, зависящих от этого компонента. Кроме того, вся система не может действовать до тех пор, пока выходной сигнал компонента не стабилизируется до некоторого значения, близкого к его конечному состоянию, задерживая общий отклик системы. Формально знание переходной характеристики динамической системы дает информацию о стабильность такой системы и ее способности достигать одного стационарного состояния при запуске из другого.
Формальное математическое описание

В этом разделе дается формальное математическое определение переходной характеристики в терминах абстрактной математической концепции динамическая система : здесь перечислены все обозначения и предположения, необходимые для следующего описания.

- это параметр эволюции системы, называемой "время " ради простоты,
- это государственный системы во время , который для простоты называется "выводом",
- это динамическая система функция эволюции,
- это динамическая система начальное состояние,
- это Ступенчатая функция Хевисайда






Нелинейная динамическая система
Для общей динамической системы переходная характеристика определяется следующим образом:

Это функция эволюции когда управляющие входы (или исходный термин, или же форсирование входов ) являются функциями Хевисайда: обозначение подчеркивает эту концепцию, показывая ЧАС(т) в качестве нижнего индекса.
Линейная динамическая система
Для линейный неизменный во времени (LTI) черный ящик, пусть для удобства обозначений: переходная характеристика может быть получена свертка из Ступенчатая функция Хевисайда контроль и импульсивный ответ час(т) самой системы


что для системы LTI эквивалентно простому интегрированию последнего. И наоборот, для системы LTI производная переходной характеристики дает импульсную характеристику:
- .

Однако эти простые соотношения неверны для нелинейных или временная система.[1]
Временная область против частотной области
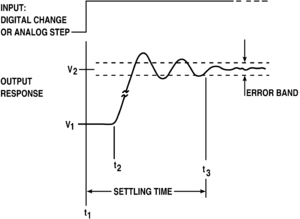
Вместо частотной характеристики производительность системы может быть определена в терминах параметров, описывающих зависимость отклика от времени. Переходную характеристику можно описать следующими величинами, связанными с ее поведение во времени,
В случае линейный динамические системы, по этим характеристикам можно сделать много выводов о системе. Ниже представлена переходная характеристика простого двухполюсного усилителя, и проиллюстрированы некоторые из этих условий.
Усилители обратной связи

В этом разделе описывается ступенчатая характеристика простого усилитель отрицательной обратной связи показано на рисунке 1. Усилитель обратной связи состоит из основного открытый цикл усилитель усиления АПР и цикл обратной связи, управляемый коэффициент обратной связи β. Этот усилитель обратной связи анализируется, чтобы определить, как его переходная характеристика зависит от постоянных времени, управляющих откликом основного усилителя, и от количества используемой обратной связи.
Усилитель с отрицательной обратной связью имеет коэффициент усиления (см. усилитель отрицательной обратной связи ):

куда АПР = открытый цикл прирост, АFB = замкнутый контур усиление (усиление при наличии отрицательной обратной связи) и β = коэффициент обратной связи.
С одним доминирующим полюсом
Во многих случаях прямой усилитель может быть достаточно хорошо смоделирован в терминах единственного доминирующего полюса постоянной времени τ, т.е. как коэффициент усиления без обратной связи, определяемый как:

с нулевым усилением частоты А0 и угловая частота ω = 2πж. Этот прямой усилитель имеет ступенчатую характеристику.
- ,

экспоненциальный подход от 0 к новому равновесному значению А0.
Передаточная функция однополюсного усилителя приводит к коэффициенту усиления с обратной связью:
- •


Этот коэффициент усиления с обратной связью имеет ту же форму, что и коэффициент усиления с обратной связью: однополюсный фильтр. Его ступенчатая характеристика имеет ту же форму: экспоненциальный спад к новому равновесному значению. Но постоянная времени ступенчатой функции с обратной связью равна τ / (1 + β А0), поэтому он быстрее отклика прямого усилителя в 1 + β А0:
- ,

По мере увеличения коэффициента обратной связи β переходная характеристика будет увеличиваться до тех пор, пока исходное предположение об одном доминирующем полюсе не перестанет быть точным. Если есть второй полюс, то по мере приближения постоянной времени замкнутого контура к постоянной времени второго полюса необходим двухполюсный анализ.
Двухполюсные усилители
В случае, когда коэффициент усиления без обратной связи имеет два полюса (два постоянные времени, τ1, τ2), ступенчатая характеристика немного сложнее. Коэффициент усиления без обратной связи определяется по формуле:

с нулевым усилением частоты А0 и угловая частота ω = 2πж.
Анализ
Передаточная функция двухполюсного усилителя приводит к коэффициенту усиления с обратной связью:
- •


Зависимость усилителя от времени легко обнаружить, переключив переменные на s = jω, после чего коэффициент усиления становится:
- •


Полюса этого выражения (то есть нули знаменателя) находятся в:


что показывает при достаточно больших значениях βA0 квадратный корень становится квадратным корнем из отрицательного числа, то есть квадратный корень становится мнимым, а положения полюсов - комплексно сопряженными числами, либо s+ или же s−; см. рисунок 2:

с

и

Используя полярные координаты с величиной радиуса корней, заданной формулой |s| (Фигура 2):

а угловая координата φ определяется как:

Таблицы Преобразования Лапласа показывают, что временная характеристика такой системы состоит из комбинаций двух функций:


то есть решения представляют собой затухающие колебания во времени. В частности, единичная переходная характеристика системы:[2]

что упрощает

когда А0 стремится к бесконечности, а коэффициент обратной связи β равен единице.
Обратите внимание, что затухание отклика задается параметром ρ, то есть постоянными времени усилителя без обратной связи. Напротив, частота колебаний задается параметром μ, то есть параметром обратной связи через βА0. Поскольку ρ представляет собой сумму, обратную постоянным времени, интересно отметить, что в ρ преобладает короче из двух.
Полученные результаты
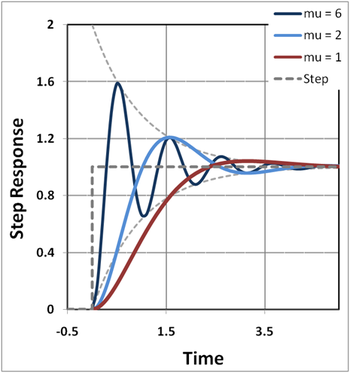
На рисунке 3 показан временной отклик на вход единичного шага для трех значений параметра μ. Можно видеть, что частота колебаний увеличивается с увеличением μ, но колебания содержатся между двумя асимптотами, задаваемыми экспонентами [1 - exp (−ρt)] и [1 + exp (−ρt)]. Эти асимптоты определяются ρ и, следовательно, постоянными времени усилителя без обратной связи, независимо от обратной связи.
Явление колебания конечного значения называется звон. В превышение является максимальным размахом выше конечного значения и явно увеличивается с увеличением μ. Точно так же недолет - минимальное колебание ниже конечного значения, снова увеличивающееся с увеличением μ. В время установления это время, когда отклонения от конечного значения опускаются ниже определенного уровня, скажем, 10% от конечного значения.
Зависимость времени установления от μ не очевидна, и приближение двухполюсной системы, вероятно, недостаточно точно, чтобы делать какие-либо реальные выводы о зависимости времени установления от обратной связи. Однако асимптоты [1 - exp (−ρt)] и [1 + exp (−ρt)] явно влияют на время установления, и они управляются постоянными времени усилителя разомкнутого контура, особенно более коротким из двух значений времени. константы. Это предполагает, что спецификация времени установления должна быть удовлетворена соответствующей конструкцией усилителя с разомкнутым контуром.
Два основных вывода из этого анализа:
- Обратная связь управляет амплитудой колебаний относительно конечного значения для данного усилителя без обратной связи и заданных значений постоянных времени без обратной связи, τ1 и τ2.
- Усилитель с разомкнутым контуром определяет время установления. Он устанавливает шкалу времени, показанную на рисунке 3, и чем быстрее усилитель без обратной связи, тем быстрее эта шкала времени.
В стороне, можно отметить, что реальные отклонения от этой линейной двухполюсной модели происходят из-за двух основных сложностей: во-первых, реальные усилители имеют более двух полюсов, а также нулей; во-вторых, реальные усилители нелинейны, поэтому их переходная характеристика изменяется в зависимости от амплитуды сигнала.
Контроль перерегулирования
Далее обсуждается, как можно контролировать перерегулирование с помощью выбора соответствующих параметров.
Используя приведенные выше уравнения, величину перерегулирования можно определить, дифференцируя переходную характеристику и найдя ее максимальное значение. Результат для максимальной ступенчатой характеристики SМаксимум является:[3]

Конечное значение переходной характеристики равно 1, поэтому экспонента является фактическим перерегулированием. Ясно, что выброс равен нулю, если μ = 0, что является условием:

Эта квадратичная функция решается для отношения постоянных времени, задавая Икс = (τ1 / τ2)1 / 2 с результатом

Поскольку β А0 >> 1, можно отбросить 1 в квадратном корне, и результат будет

На словах первая постоянная времени должна быть намного больше второй. Чтобы быть более рискованным, чем конструкция, не допускающая перерегулирования, мы можем ввести коэффициент α в указанное выше соотношение:

и пусть α устанавливается величиной допустимого перерегулирования.
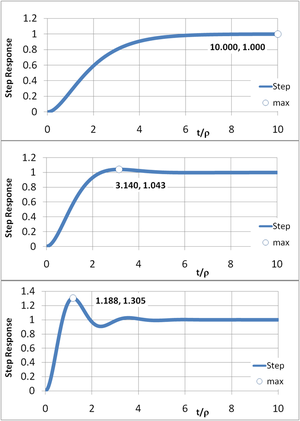
Рисунок 4 иллюстрирует процедуру. Сравнение верхней панели (α = 4) с нижней панелью (α = 0,5) показывает, что более низкие значения α увеличивают скорость отклика, но увеличивают выбросы. Случай α = 2 (центральная панель) - это максимально плоский дизайн, который не показывает пика в График зависимости усиления Боде от частоты. Этот дизайн имеет практическое правило встроенный запас прочности для работы с неидеальными реалиями, такими как множественные полюса (или нули), нелинейность (зависимость амплитуды сигнала) и производственные отклонения, любые из которых могут привести к слишком сильному перерегулированию. Регулировка расстояния между полюсами (то есть установка α) является предметом частотная компенсация, и одним из таких методов является расщепление полюсов.
Контроль времени установления
Амплитуда звона в переходной характеристике на рисунке 3 определяется коэффициентом демпфирования exp (−ρ t). То есть, если мы укажем некоторое допустимое отклонение ступенчатой характеристики от конечного значения, скажем Δ, то есть:

это условие выполняется независимо от значения β АПР при условии, что время больше, чем время установления, скажем тS, предоставленный:[4]

где τ1 >> τ2 применимо из-за условия управления перерегулированием, которое делает τ1 = αβAПР τ2. Часто условие времени установления упоминается, говоря, что период установления обратно пропорционален ширине полосы единичного усиления, потому что 1 / (2π τ2) близка к этой ширине полосы для усилителя с типичным компенсация доминирующего полюса. Однако этот результат более точен, чем этот практическое правило. В качестве примера этой формулы, если Δ = 1 / e4 = 1,8%, условие времени установления тS = 8 τ2.
Как правило, контроль перерегулирования устанавливает коэффициент постоянной времени, а время установления тS множества τ2.[5][6][7]
Идентификация системы с помощью шаговой реакции: система с двумя реальными полюсами





В этом методе используются важные точки ступенчатой характеристики. Угадывать касательные к мерам Сигнал не нужно. Уравнения выводятся с помощью численного моделирования, определяющего некоторые важные соотношения и подгоночные параметры нелинейных уравнений. Смотрите также [8].
Вот шаги:
- Измерьте ступенчатую характеристику системы системы с входным ступенчатым сигналом .
- Определите промежутки времени и где ступенчатая характеристика достигает 25% и 75% выходного значения в установившемся режиме.
- Определите установившееся усиление системы с
- Рассчитать







- Определите две постоянные времени


- Рассчитайте передаточную функцию идентифицированной системы в пределах области Лапласа

Запас по фазе
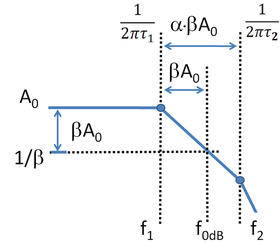
Далее выбор отношения полюсов τ1/ τ2 связано с запасом по фазе усилителя обратной связи.[9] Процедура, изложенная в Сюжет Боде статья отслеживается. На рис. 5 показан график усиления Боде для двухполюсного усилителя в диапазоне частот до второго полюса. На рисунке 5 предполагается, что частота ж0 дБ лежит между нижним полюсом на ж1 = 1 / (2πτ1) и второй полюс в точке ж2 = 1 / (2πτ2). Как показано на рисунке 5, это условие выполняется для значений α ≥ 1.
На рисунке 5 частота (обозначенная ж0 дБ) находится там, где коэффициент усиления контура βА0 удовлетворяет условию единичного усиления или 0 дБ, как определено:

Наклон нисходящего участка графика усиления составляет (20 дБ / декада); на каждое десятикратное увеличение частоты коэффициент усиления падает в тот же раз:

Запас по фазе - это выход фазы на ж0 дБ от −180 °. Таким образом, маржа составляет:

Потому что ж0 дБ / ж1 = βA0 >> 1, член в ж1 составляет 90 °. Таким образом, запас по фазе:



В частности, для случая α = 1 φм = 45 °, а при α = 2 φм = 63,4 °. Сансен[10] рекомендует α = 3, φм = 71,6 ° как «хорошее начальное положение безопасности».
Если увеличить α за счет сокращения τ2, время установления тS также укорачивается. Если увеличить α за счет удлинения τ1, время установления тS мало переделан. Чаще как τ1 и τ2 изменить, например, если техника расщепление полюсов используется.
Кроме того, для усилителя с более чем двумя полюсами диаграмму на рис. 5 все же можно подогнать под графики Боде, сделав ж2 подгоночный параметр, называемый положением «эквивалентного второго полюса».[11]
Смотрите также
- Импульсивный ответ
- Перебег (сигнал)
- Расщепление полюсов
- Время нарастания
- Время установления
- Постоянная времени
Ссылки и примечания
- ^ Юрий Шмалий (2007). Системы с непрерывным временем. Springer Science & Business Media. п.46. ISBN 978-1-4020-6272-8.
- ^ Бенджамин C Куо и Golnaraghi F (2003). Системы автоматического управления (Восьмое изд.). Нью-Йорк: Вили. п. 253. ISBN 0-471-13476-7.
- ^ Бенджамин C Куо и Golnaraghi F (2003). п. 259. ISBN 0-471-13476-7.
- ^ Эта оценка немного консервативна (длинна), потому что коэффициент 1 / sin (φ) в вкладе перерегулирования в S (т) заменено на 1 / sin (φ) ≈ 1.
- ^ Дэвид А. Джонс и Мартин К. В. (1997). Аналоговая интегральная схема. Нью-Йорк: Вили. С. 234–235. ISBN 0-471-14448-7.
- ^ Вилли М. К. Сансен (2006). Основы аналогового дизайна. Дордрехт, Нидерланды: Springer. п. §0528 с. 163. ISBN 0-387-25746-2.
- ^ По словам Джонса и Мартина, op. соч., время установления значимо в схемы с переключаемыми конденсаторами, например, когда время установления операционного усилителя должно быть меньше половины тактового периода для достаточно быстрой передачи заряда.
- ^ «Идентификация демпфированной системы PT2 | Hackaday.io». hackaday.io. Получено 2018-08-06.
- ^ Запас усиления усилителя не может быть найден с использованием двухполюсной модели, поскольку запас усиления требует определения частоты ж180 где коэффициент усиления меняет знак, чего никогда не происходит в двухполюсной системе. Если мы знаем ж180 для имеющегося усилителя запас по усилению можно найти примерно, но ж180 затем зависит от положения третьего и более высоких полюсов, как и запас по усилению, в отличие от оценки запаса по фазе, которая является двухполюсной оценкой.
- ^ Вилли М. К. Сансен (30 ноября 2006 г.). §0526 с. 162. ISBN 0-387-25746-2.
- ^ Гаэтано Палумбо и Пенниси S (2002). Усилители обратной связи: теория и конструкция. Бостон / Дордрехт / Лондон: Kluwer Academic Press. С. § 4.4 с. 97–98. ISBN 0-7923-7643-9.
дальнейшее чтение
- Роберт И. Демроу Время установления операционных усилителей [1]
- Чезми Каябаси Установление методов измерения времени для достижения высокой точности на высоких скоростях [2]
- Владимир Игоревич Арнольд «Обыкновенные дифференциальные уравнения», различные издания MIT Press и Springer Verlag, глава 1 «Основные понятия»