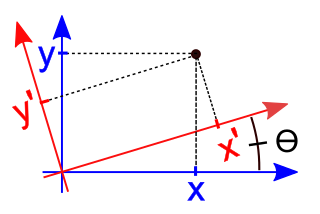
An ху-Декартова система координат повернута на угол для x'y '-Декартова система координат
В математика, а вращение осей в двух измерениях это отображение из ху-Декартова система координат для x'y '-Декартова система координат, в которой источник фиксируется, а Икс' и y ' оси получаются вращением Икс и у оси против часовой стрелки на угол . Точка п имеет координаты (Икс, у) относительно исходной системы и координат (Икс', y ') по отношению к новой системе.[1] В новой системе координат точка п будет казаться повернутым в противоположном направлении, то есть по часовой стрелке на угол . Аналогично определяется вращение осей более чем в двух измерениях.[2][3] Вращение осей - это линейная карта[4][5] и жесткая трансформация.
Системы координат необходимы для изучения уравнений кривые используя методы аналитическая геометрия. Для использования метода координатной геометрии оси располагаются в удобном месте по отношению к рассматриваемой кривой. Например, чтобы изучить уравнения эллипсы и гиперболы, то фокусы обычно расположены на одной из осей и расположены симметрично относительно начала координат. Если кривая (гипербола, парабола, эллипс и т. д.) нет Расположенная удобно по отношению к осям, необходимо изменить систему координат, чтобы расположить кривую в удобном и знакомом месте и ориентации. Процесс внесения этого изменения называется преобразование координат.[6]
Решения многих проблем можно упростить, вращая оси координат, чтобы получить новые оси через то же начало.
Вывод
Уравнения, определяющие преобразование в двух измерениях, которое вращает ху оси против часовой стрелки на угол в x'y ' оси, выводятся следующим образом.
в ху система, пусть точка п имеют полярные координаты. Затем в x'y ' система, п будет иметь полярные координаты .
Найдите координаты точки после поворота осей на угол , или 30 °.
Решение:
Оси повернуты против часовой стрелки на угол и новые координаты . Обратите внимание, что точка, похоже, была повернута по часовой стрелке на относительно фиксированных осей, так что теперь он совпадает с (новым) Икс' ось.
Пример 2
Найдите координаты точки после поворота осей по часовой стрелке на 90 °, то есть на угол , или -90 °.
Решение:
Оси повернуты на угол , который направлен по часовой стрелке, и новые координаты . Опять же, обратите внимание, что точка, похоже, была повернута против часовой стрелки на относительно неподвижных осей.
За счет изменения координат (поворот осей и перевод осей ), уравнение (9) можно поместить в стандартная форма, с которым обычно легче работать. Всегда можно повернуть координаты так, чтобы в новой системе не было x'y ' срок. Подставляя уравнения (7) и (8) в уравнение (9), мы получаем
(10)
куда
(11)
Если выбрано так, чтобы у нас будет и x'y ' член в уравнении (10) исчезнет.[11]
Когда возникает проблема с B, D и E все отличные от нуля, они могут быть устранены путем последовательного вращения (исключение B) и перевод (исключив D и E термины).[12]
Обозначение повернутых конических секций
Невырожденное коническое сечение, заданное уравнением (9) могут быть идентифицированы путем оценки . Коническое сечение:
Предположим прямоугольную xyz-система координат вращается вокруг своей z ось против часовой стрелки (если смотреть вниз z ось) под углом , то есть положительный Икс ось сразу поворачивается в положительную у ось. В z координата каждой точки не изменяется, а Икс и у координаты преобразуются, как указано выше. Старые координаты (Икс, у, z) точки Q связаны с его новыми координатами (Икс', y ', z ') к