Нормальный (геометрия) - Normal (geometry)

В геометрия, а нормальный такой объект, как линия, луч, или вектор это перпендикуляр к заданному объекту. Например, в двух измерениях нормальная линия к кривой в данной точке - это линия, перпендикулярная касательная линия к кривой в точке. вектор нормали может иметь длину единицу (a единичный вектор ) или его длина может представлять кривизну объекта (a вектор кривизны ); его алгебраический знак может указывать на стороны (внутренние или внешние).
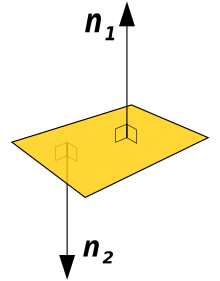
В трех измерениях нормальная поверхность, или просто нормальный, в поверхность в точке п это вектор перпендикуляр к касательная плоскость поверхности на п. Слово «нормальный» также используется как прилагательное: линия нормальный к самолет, то нормальный компонент сила, то нормальный вектори т. д. Понятие нормальности обобщается на ортогональность (прямые углы ).
Концепция была обобщена на дифференцируемые многообразия произвольной размерности, вложенной в Евклидово пространство. В нормальное векторное пространство или нормальное пространство многообразия в точке п - множество векторов, ортогональных касательное пространство в п. Нормальные векторы представляют особый интерес в случае плавные кривые и гладкие поверхности.
Нормаль часто используется в 3D компьютерная графика (обратите внимание на сингулярность, так как будет определена только одна нормаль), чтобы определить ориентацию поверхности к источник света за плоская штриховка, или ориентация каждого из углов поверхности (вершины ) для имитации изогнутой поверхности с Затенение по Фонгу.
Нормально к поверхностям в трехмерном пространстве

Расчет нормали к поверхности
Для выпуклый многоугольник (например, треугольник ) нормаль к поверхности может быть вычислена как вектор перекрестное произведение двух (непараллельных) ребер многоугольника.
Для самолет заданный уравнением , вектор это нормально.


Для плоскости, уравнение которой задано в параметрической форме
- ,

где р0 точка на плоскости и п, q - непараллельные векторы, указывающие вдоль плоскости, нормаль к плоскости - это вектор, нормальный к обоим п и q, который можно найти как перекрестное произведение .

Если (возможно, не плоская) поверхность S в 3-м пространстве р3 является параметризованный по системе криволинейные координаты р(s, т) = (x (s, t), y (s, t), z (s, t)), причем s и т настоящий переменных, то нормаль к S по определению является нормалью к касательной плоскости, заданной перекрестным произведением частные производные

Если поверхность S дано неявно как набор точек удовлетворение , то нормаль в точке на поверхности задается градиент



поскольку градиент в любой точке перпендикулярен установленному уровню С.
Для поверхности S в р3 заданный как график функции , направленная вверх нормаль может быть найдена либо с помощью параметризации , давая:



или проще из его неявной формы , давая .


Поскольку поверхность не имеет касательной плоскости в точке особая точка, в этой точке у него нет четко определенной нормали: например, вершина конус. В общем, можно определить нормаль почти всюду для поверхности, которая Липшицева непрерывная.
Выбор нормального

Нормаль к (гипер) поверхности обычно масштабируется так, чтобы иметь длина единицы, но он не имеет однозначного направления, поскольку его противоположность также является единичной нормалью. Для поверхности, которая является топологическая граница набора в трех измерениях, можно различить направленный внутрь нормальный и внешняя нормаль. Для ориентированная поверхность, нормаль обычно определяется правило правой руки или его аналог в более высоких измерениях.
Если нормаль строится как векторное произведение касательных векторов (как описано в тексте выше), это псевдовектор.
Преобразование нормалей
- Примечание: в этом разделе мы используем только верхнюю матрицу 3x3, поскольку перевод не имеет отношения к вычислению.
При применении преобразования к поверхности часто бывает полезно получить нормали для результирующей поверхности из исходных нормалей.
В частности, учитывая матрицу преобразования 3x3 M, мы можем определить матрицу W который преобразует вектор п перпендикулярно касательной плоскости т в вектор п ' перпендикулярно преобразованной касательной плоскости М т, по следующей логике:
Написать п ' так как W n. Мы должны найти W.





Ясно выбирая W такой, что , или , будет удовлетворять приведенному выше уравнению, давая перпендикулярно , или п ' перпендикулярно t ′, как требуется.




Следовательно, при преобразовании нормалей к поверхности следует использовать обратное транспонирование линейного преобразования. Обратное транспонирование равно исходной матрице, если матрица ортонормирована, то есть чисто вращательная без масштабирования или сдвига.
Гиперповерхности в п-мерное пространство
Для -размерный гиперплоскость в п-мерное пространство рп заданный его параметрическим представлением

- ,

где п0 точка на гиперплоскости и пя за я = 1, ..., п-1 - линейно независимые векторы, указывающие вдоль гиперплоскости, нормалью к гиперплоскости является любой вектор в пустое пространство матрицы , смысл . То есть любой вектор, ортогональный всем векторам в плоскости, по определению является нормалью к поверхности. В качестве альтернативы, если гиперплоскость определяется как набор решений одного линейного уравнения , то вектор это нормально.

![{ displaystyle P = [ mathbf {p} _ {1} dots mathbf {p} _ {n-1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0918ef93530259db6f1ed5d70d47ceb41bf8085a)



Определение нормали к поверхности в трехмерном пространстве может быть расширено до (п-1) -мерный гиперповерхности в рп. Гиперповерхность может быть локально определяется неявно как набор точек удовлетворяющий уравнению , где дано скалярная функция. Если является непрерывно дифференцируемый то гиперповерхность является дифференцируемое многообразие в окрестности точек, где градиент не равно нулю. В этих точках вектор нормали задается градиентом:




В нормальная линия - одномерное подпространство с базой {п}.
Разновидности, определяемые неявными уравнениями в п-мерное пространство
А дифференциальное разнообразие определяется неявными уравнениями в п-мерное пространство рп - множество общих нулей конечного множества дифференцируемых функций из п переменные

В Матрица якобиана из разнообразия k×п матрица, чья я-я строка - это градиент жя. Посредством теорема о неявной функции, сорт является многообразие в окрестности точки, где матрица Якоби имеет ранг k. В такой момент п, то нормальное векторное пространство - векторное пространство, порожденное значениями в п векторов градиента жя.
Другими словами, разнообразие определяется как пересечение k гиперповерхности, а нормальное векторное пространство в точке - это векторное пространство, порожденное векторами нормалей гиперповерхностей в точке.
В нормальное (аффинное) пространство в какой-то момент п из разнообразия аффинное подпространство проходя через п и порождается нормальным векторным пространством в точке п.
Эти определения могут быть расширены дословно в точки, где многообразие не является многообразием.
пример
Позволять V - многообразие, определяемое в трехмерном пространстве уравнениями

Это разнообразие представляет собой объединение Иксось и у-ось.
В какой-то момент (а, 0, 0), где а ≠ 0, строки матрицы Якоби равны (0, 0, 1) и (0, а, 0). Таким образом, нормальное аффинное пространство - это плоскость уравнения Икс = а. Аналогично, если б ≠ 0нормальная плоскость в точке (0, б, 0) плоскость уравнения у = б.
В точке (0, 0, 0) строки матрицы Якоби (0, 0, 1) и (0, 0, 0). Таким образом, нормальное векторное пространство и нормальное аффинное пространство имеют размерность 1, а нормальное аффинное пространство - это z-ось.
Использует
- Нормали к поверхности полезны при определении поверхностные интегралы из векторные поля.
- Нормали поверхности обычно используются в 3D компьютерная графика за освещение расчеты (см. Закон косинусов Ламберта ), часто корректируемый нормальное отображение.
- Слои визуализации содержащая поверхностную нормальную информацию, может использоваться в Цифровой композитинг для изменения видимого освещения визуализируемых элементов.[нужна цитата ]
- В компьютерное зрение, формы 3D-объектов оцениваются по нормалям поверхности с использованием фотометрическое стерео.[1]
Нормаль в геометрической оптике
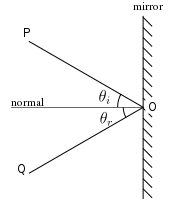
В нормальный луч это направленный наружу луч перпендикуляр на поверхность оптическая среда в заданной точке.[2] В отражение света, то угол падения и угол отражения - соответственно угол между нормалью и падающий луч (на плоскость падения ) и угол между нормалью и отраженный луч.
Смотрите также
использованная литература
- ^ Инь Ву. «Радиометрия, BRDF и фотометрическое стерео» (PDF). Северо-Западный университет.
- ^ "Закон отражения". Учебник по физике. В архиве из оригинала 27 апреля 2009 г.. Получено 2008-03-31.
внешняя ссылка
- Вайсштейн, Эрик В. «Нормальный вектор». MathWorld.
- An объяснение нормальных векторов из Microsoft MSDN
- Очистить псевдокод для вычисление нормали к поверхности из треугольника или многоугольника.