Система мобильного обслуживания - Mobile Servicing System


В Система мобильного обслуживания (MSS) это робот система на борту Международная космическая станция (МКС). Запущенный на МКС в 2001 году, он играет ключевую роль в сборке и обслуживании станции; он перемещает оборудование и материалы по станции, поддерживает астронавтов, работающих в космосе, обслуживает инструменты и другую полезную нагрузку, прикрепленную к МКС, и используется для внешнего обслуживания. Астронавты проходят специальную подготовку, позволяющую им выполнять эти функции с различными системами MSS.
MSS состоит из трех компонентов:
- система удаленного манипулятора космической станции (SSRMS), известная как Canadarm2.
- Базовая система мобильного удаленного обслуживания (MBS).
- в Ловкий манипулятор специального назначения (SPDM, также известный как «Dextre» или «Канадская рука»).
Система может двигаться по рельсам на Интегрированная ферменная конструкция наверху США предоставили тележку Mobile Transporter, на которой размещена базовая система MRS. Программное обеспечение для управления системой было написано на Язык программирования Ada 95.[1]
MSS был разработан и изготовлен MDA, (ранее подразделения MacDonald Dettwiler Associates называли Космические миссии MDA, MD Robotics, ранее называвшаяся SPAR Aerospace) для Канадское космическое агентство вклад в Международную космическую станцию.
Canadarm2






Официально известный как Система дистанционного манипулятора космической станции (SSRMS). Запущен на СТС-100 в апреле 2001 года эта рука второго поколения представляет собой более крупную и усовершенствованную версию Космический шатл оригинальный Canadarm. Canadarm2 составляет 17,6 м (58 футов) в полностью разложенном состоянии и имеет семь моторизованных шарниров («локтевой» шарнир посередине и три поворотных шарнира на каждом из концов «запястье / плечо»). Он имеет массу 1800 кг (4000 фунтов) и диаметр 35 см (14 дюймов) и сделан из титана. Рукав способна обрабатывать большие полезные нагрузки до 116 000 кг (256 000 фунтов) и помогала стыковать космический шаттл. Он перемещается самостоятельно и может перемещаться из стороны в сторону, чтобы достичь многих частей космической станции в одном месте. дюймовый червь -подобное движение. В этом движении он ограничен только количеством Захваты Power Data Grapple (PDGFs) на станции. PDGF, расположенные вокруг станции, обеспечивают питание, данные и видео на руку через любой из двух Концевые эффекторы с фиксацией (LEE). Рука также может перемещаться по всей длине фермы космической станции с использованием мобильной базовой системы.
Помимо перемещения по станции, рука может перемещать любой объект с приспособление для захвата. При строительстве станции рычаг использовался для перемещения больших сегментов на место. Его также можно использовать для захвата беспилотных кораблей, таких как SpaceX Dragon, то Лебедь космический корабль, и японский Транспортное средство H-II (HTV), которые оснащены стандартным захватным устройством, которое Canadarm2 использует для захвата и стыковки космического корабля. Рука также используется для отстыковки и освобождения космического корабля после использования.
Операторы на борту видят, что они делают, глядя на три ЖК-экрана роботизированной рабочей станции (RWS). MSS имеет два блока RWS: один расположен в Судьба модуль а другой в Купол. Только один RWS контролирует MSS одновременно. RWS имеет два набора джойстиков управления: один поворотный ручной контроллер (RHC) и один поступательный ручной контроллер (THC). В дополнение к этому есть дисплей и панель управления (DCP) и переносная компьютерная система (PCS).
В последние годы большинством операций роботов дистанционно управляют диспетчеры полета на земле в Кристофер К. Крафт-младший Центр управления полетами, или из Канадское космическое агентство. Операторы могут работать посменно для достижения целей с большей гибкостью, чем когда это делают операторы бортовой бригады, хотя и более медленными темпами. Операторы-космонавты используются для критических по времени операций, таких как посещение транспортных средств и робототехника. внекорабельная деятельность.
Концевые эффекторы с фиксацией


Canadarm2 имеет два LEE, по одному на каждом конце. LEE имеет 3 провода малого барабана для захвата приспособление для захвата вал.[2] Другой LEE находится в блоке размещения полезной нагрузки ORU (POA) мобильной базовой системы. POA LEE используется для временного хранения крупных компонентов МКС. Еще один - о ловком манипуляторе специального назначения (SPDM, также известный как «Dextre» или «канадская рука»). Шесть LEE были изготовлены и использовались в различных местах на МКС.
| S / N | Исходное местоположение | Текущее местоположение |
|---|---|---|
| 201 | ЛИ Б | POA LEE |
| 202 | ЛИ А | Земля под ремонт для Ground Spare |
| 203 | POA LEE | ЛИ А |
| 204 | Запасные части хранятся на ELC1 | ЛИ Б |
| 205 | Земля, наземный запасной | Запасные части хранятся на внешней МКС |
| 301 | СПДМ ЛИ | СПДМ ЛИ |
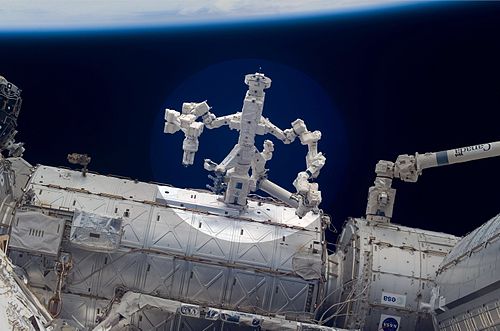
Ловкий манипулятор специального назначения
Ловкий манипулятор специального назначения, или "Dextre ", представляет собой двухрукий робот меньшего размера, который можно прикрепить к Canadarm2, МКС или мобильной базовой системе. Руки и его электроинструменты способны выполнять сложные задачи сборки и изменения Орбитальные сменные блоки (ORU) в настоящее время обрабатывается космонавтами во время выходов в открытый космос. Хотя Canadarm2 может перемещаться по станции «движением дюймового червя», он не может ничего нести с собой, если не прикреплен Dextre. Испытания проводились в камерах космического моделирования Канадского космического агентства. Лаборатория Дэвида Флориды в Оттава, Онтарио. Спуск манипулятора на станцию осуществлен 11 марта 2008 г. СТС-123.
Мобильная базовая система

Базовая система Mobile Remote Servicer Base System (MBS) является базовой платформой для роботизированного манипулятора. Добавлен на станцию во время СТС-111 в июне 2002 года. Платформа покоится на Мобильный транспортер[3] (установлен на СТС-110, разработано Northrop Grumman в Карпинтерия, Калифорния ), что позволяет ему скользить по рельсам на 108 метров по главная ферма станции.[4] Canadarm2 может перемещаться самостоятельно, но не может одновременно перемещаться, Dextre не может перемещаться самостоятельно. MBS дает двум роботизированным манипуляторам возможность перемещаться к рабочим участкам по всей конструкции фермы и по пути заходить на грейферные приспособления. Когда Canadarm2 и Dextre прикреплены к MBS, их общая масса составляет 4900 кг (10800 фунтов).[5] Нравиться Canadarm2 он был построен MD Robotics и имеет минимальный срок службы 15 лет.[6][7]
МБС комплектуется четырьмя Захваты Power Data Grapple, по одному в каждом из четырех верхних углов. Любой из них может использоваться в качестве базы для двух роботов, Canadarm2 и Dextre, а также любой полезной нагрузки, которую они могут удерживать. MBS также имеет два места для прикрепления полезных данных. Первый - это Размещение полезной нагрузки / орбитальной сменной единицы (POA). Это устройство, которое выглядит и работает так же, как Концевые эффекторы с фиксацией компании Canadarm2. Его можно использовать для парковки, питания и управления любым грузом с помощью приспособления для захвата, при этом Canadarm2 может делать что-то еще. Другое место прикрепления - это Общая система крепления MBS (MCAS). Это еще один тип системы крепления, который используется для проведения научных экспериментов.[6]
MBS также поддерживает космонавтов во время выход в открытый космос. В нем есть места для хранения инструментов и оборудования, подножек, поручней и точек крепления страховочного троса, а также камеры в сборе. При необходимости космонавт даже может «оседлать» MBS, пока он движется с максимальной скоростью около 1,5 метров в минуту.[3] По обе стороны от MBS находятся средства перевода экипажа и оборудования. Эти тележки едут по тем же рельсам, что и MBS. Во время выхода в открытый космос астронавты управляют ими вручную, чтобы транспортировать оборудование и облегчить передвижение по станции.
Усовершенствованная стрела МКС
27 мая 2011 г. была установлена стрела длиной 15,24 метра (50 футов) с поручнями и камерами для осмотра, прикрепленная к концу Canadarm2.

Система дистанционного манипулятора Shuttle (RMS), удерживающая стрелу OBSS на STS-114

Астронавт Скотт Паразински (справа) едет на штанге OBSS для ремонта солнечной батареи во время STS-120


Другая робототехника МКС
Станция получила вторую роботизированную руку во время СТС-124, то Японский экспериментальный модуль Система удаленного манипулятора (JEM-RMS). JEM-RMS будет в основном использоваться для обслуживания Открытый объект JEM. Дополнительная роботизированная рука, Европейский роботизированный манипулятор (ERA) планируется запустить вместе с российскими Многоцелевой лабораторный модуль в мае 2021 г.
Подключен к Пирс, на МКС также есть два Стрела грузовые краны. Один из кранов можно выдвинуть, чтобы добраться до конца Заря. Другой может доходить до противоположной стороны и доходить до конца Звезда. Первый кран был собран в космосе во время СТС-96 и СТС-101. Второй кран спустили вместе с самим «Пирсом».
Список кранов
| Имя | Агентство или Компания | Запуск |
|---|---|---|
| Канадарм 2 | Канадское космическое агентство | 19 апреля 2001 г. |
| Dextre | Канадское космическое агентство | 11 марта 2008 г. |
Смотрите также
- MacDonald Dettwiler and Associates (MDA), производители Canadarm2
- Canadarm, который использовался на Орбитальные аппараты космического корабля
- Европейский роботизированный манипулятор, третий робот-манипулятор будет установлен на МКС
- Система удаленного манипулятора, используемая в модуле МКС Кибо
- Dextre, также известный как ловкий манипулятор специального назначения (SPDM), используемый на МКС
- Стрела, кран, используемый на МКС для выполнения задач, аналогичных мобильной сервисной системе.
Рекомендации
- ^ «Пример использования: MDA - канадская космическая армия» (PDF). AdaCore. Получено 2009-10-15.
- ^ Контрольный список EVA Дополнение к полетам STS-126, 2008 г. страницы 115, 117, 118
- ^ а б «Самый медленный и самый быстрый поезд во Вселенной». НАСА.
- ^ «Архивная копия». Архивировано из оригинал на 2015-06-29. Получено 2015-06-26.CS1 maint: заархивированная копия как заголовок (связь)
- ^ Гарсия, Марк (22 октября 2018 г.). «Система мобильного обслуживания». НАСА.
- ^ а б «CSA - STS-111 - Мобильная базовая система - MBS Design». Канадское космическое агентство. Получено 2008-03-15.
- ^ «CSA - STS-111 - Мобильная базовая система - Справочная информация». Канадское космическое агентство. Получено 2008-03-15.[постоянная мертвая ссылка ]
дальнейшее чтение
- Роботизированная передача и интерфейсы для внешних полезных нагрузок МКС. 2014 г. хорошие диаграммы SSRMS / Canadarm2
внешняя ссылка
- Сборка МКС: Canadarm2 и мобильная сервисная система
- Информация Канадского космического агентства о Canadarm2
- Youtube-анимация мобильной базовой системы, совместной работы Canadarm2 и Dextre
- Youtube анимация глистов Canadarm2 на станции

| Канадские астронавты |
| ||||
|---|---|---|---|---|---|
| Спутники | |||||
| Другая космическая техника | |||||
| Удобства | |||||
| Подрядчики | |||||
| Связанные учреждения | |||||
| Международные партнеры | |||||
| Другой | |||||