XPIC - XPIC
XPIC, или технология подавления кросс-поляризационных помех, представляет собой алгоритм подавления взаимных помех между двумя принятыми потоками в Мультиплексирование с поляризационным разделением система связи.
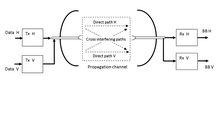
Компенсатор кросс-поляризационных помех (известный как XPIC) - это метод обработки сигналов, реализованный на демодулированных принятых сигналах на уровне основной полосы частот. Обычно это необходимо в Мультиплексирование с поляризационным разделением системы: источники данных для передачи кодируются и отображаются в QAM модулирующие символы со скоростью передачи символов системы и преобразованный на несущую частоту, генерируя два радиопотока, излучаемых одной антенной с двойной поляризацией (см. диаграмму направленности Параболическая антенна ). Соответствующая антенна с двойной поляризацией расположена на удаленном участке и подключена к двум приемникам, которые понижающее преобразование радиопотоки передаются в сигналы основной полосы частот (BB H, BB V).
Этот метод мультиплексирования / демультиплексирования основан на ожидаемом различении двух ортогональных поляризаций (XPD):
- идеальный, бесконечный XPD всей системы гарантирует, что каждый сигнал на приемниках содержит только сигнал, генерируемый соответствующим передатчиком (плюс любой тепловой шум);
- вместо этого любой реальный конечный уровень XPD проявляется как частичная рекомбинация между двумя сигналами, так что приемники наблюдают помехи из-за утечки кросс-поляризации. Некоторые из факторов, вызывающих такие кроссполяризационные помехи, перечислены в Мультиплексирование с поляризационным разделением.
Как практическое следствие, в принимающей точке два потока принимаются с остаточными взаимными помехами. Во многих практических случаях, особенно для высокоуровневых M-QAM модуляции, система связи не может выдерживать испытанные уровни кросс-поляризационных помех, и необходимо улучшенное подавление. Две полученные поляризации на выходах антенны, обычно линейная горизонтальная H и вертикальная V, направляются каждая к приемнику, выходной сигнал основной полосы частот которого дополнительно обрабатывается специальной схемой подавления кросс-поляризации, обычно реализуемой как цифровой каскад. Алгоритм XPIC обеспечивает правильную реконструкцию H путем суммирования V с H для устранения любых остаточных помех, и наоборот.
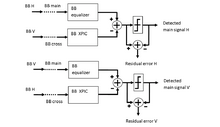
Процесс отмены обычно реализуется с использованием двух блоков: основной полосы частот эквалайзер и baseband XPIC. Выходные данные последнего вычитаются из первого и затем отправляются на этап принятия решения, отвечающий за получение оценки потока данных. Блоки выравнивания и XPIC обычно адаптируются для правильного отслеживания изменяющейся во времени функции передачи канала: XPIC должен обеспечивать формирование принятого перекрестного сигнала, равного части перекрестных помех, влияющих на основной. Управление с обратной связью для управления критериями адаптации исходит из меры остаточной ошибки по блоку принятия решений.
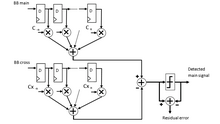
В примере оба блока основаны на типичной структуре Конечный импульсный отклик цифровой фильтр и коэффициенты которого не фиксированы, но адаптированный свести к минимуму подходящий функциональный пока несколько задержек воздействовать на входной сигнал.


Данный:
- : остаточная комплексная ошибка в момент времени ,
- : комплексная выборка основного принятого сигнала основной полосы частот в момент времени ,
- : комплексная выборка перекрестно принятого сигнала основной полосы частот в момент времени ,
- : комплексный коэффициент эквалайзера основной полосы частот на отводе j и момент времени ,
- : Комплексный коэффициент XPIC на кране j и момент времени ,
- : индекс крана
- : результат отмены действия, подающего устройство принятия решения в момент времени ,
- : оценка переданных данных в момент времени , так = -
- : размер шага или коэффициент сжатия для адаптивности,










если функция, которую необходимо минимизировать, является, например, средней мощностью остаточной ошибки, , адаптирующая алгоритм градиента предписывает, что коэффициенты равны обновлено после каждого временного шага в качестве:[1]
![{ Displaystyle J = E [| epsilon _ {k} | ^ {2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8828beda6721b9f4c2a9fdd17f3f97c9e69c945e)
- ;
- ;


где звездочка означает комплексное сопряжение. Для этой базовой схемы не требуется никаких априорных знаний о передаваемых символах (слепой или с нулевым знанием ).
Когда задержка равно периоду символа, блоки обозначаются как разделенные символами, а если - это часть периода символа, блоки, как говорят, разделены дробным интервалом.[2] Другими минимизирующими функциями являются наименьшие среднеквадратичные LMS или нулевое принудительное ZF, в то время как архитектура может быть обратной связью при принятии решения или дополнительно улучшена посредством известных сигналов (Пилотный сигнал ).
Смотрите также
- Система стирания помех с патентом на независимые приемники
- Кросс-поляризационная система передачи с патентом на асинхронные приемники
- Система связи
- Адаптивный эквалайзер
Рекомендации
- ^ Меурант, Жерар (2006). Алгоритмы Ланцоша и сопряженных градиентов: от теории к вычислениям с конечной точностью. СИАМ. ISBN 978-0898716160.
- ^ Treichler, J.R .; Fijalkow, I .; Джонсон, C.R. (1996). «Частично расположенные эквалайзеры». Журнал IEEE Signal Processing Magazine. 13 (3): 65–81. CiteSeerX 10.1.1.412.4058. Дои:10.1109/79.489269.